3차원 쿼드로터 동역학 및 상태공간 모델링 인사이트
본 논문은 3차원 쿼드로터의 비선형 동역학을 유도하고, 좌표 변환·오일러 각·뉴턴‑오일러 방식을 이용해 상태공간 모델을 구축한다. 강체 변환, 기울기·요잉 각도 정의, 기체‑관성 프레임 변환, 그리고 입력(추력·모멘트)과 출력(위치·속도·각속도) 간 관계를 상세히 제시한다. 또한 언더액추에이션 특성을 설명하고, 가정과 한계점(예: 짐벌락)도 논의한다.
저자: Rahul Vigneswaran K, Soman KP
본 논문은 3차원 쿼드로터의 동역학과 상태공간 모델링을 체계적으로 전개한다. 서론에서는 드론(무인항공기)의 급격한 보급과 그에 따른 정밀 제어 필요성을 강조하고, 쿼드로터가 4개의 프로펠러만으로 6 자유도(3번역·3회전)를 제어해야 하는 언더액추에이션 시스템임을 지적한다. 이를 해결하기 위해서는 정확한 수학적 모델이 필수적이며, 본 논문이 그 역할을 수행한다는 목표를 제시한다.
2장에서는 강체 변환의 기본 개념을 소개한다. 두 좌표계 A와 B 사이의 위치 변환을 \(^{A}\mathbf{r}_P = {}^{A}\mathbf{R}_B\,^{B}\mathbf{r}_P + {}^{A}\mathbf{r}_{O_B}\) 형태로 표현하고, 변환이 직교성·거리·벡터곱을 보존함을 증명한다. 2‑D 회전 행렬을 도출한 뒤, 이를 3‑D로 확장해 x, y, z 축 각각에 대한 회전 행렬을 제시한다.
3장에서는 오일러 각(롤 φ, 피치 θ, 요 ψ)의 정의와 Z‑Y‑X(요‑피치‑롤) 순서의 회전 행렬 R을 전개한다. R의 각 원소를 이용해 θ를 R₃₁으로부터 역산하고, atan2 함수를 통해 φ와 ψ를 구하는 절차를 상세히 설명한다. 특히 |R₃₁|=1인 경우(짐벌락)와 cosθ=0인 경우에 대한 특수 처리 방안을 제시한다. 이어서 각속도(p, q, r)와 오일러 각 속도(φ̇, θ̇, ψ̇) 사이의 비선형 관계식을 행렬 형태로 유도하고, 이를 역행렬로 풀어 오일러 각 속도를 구하는 식을 제공한다. 이 관계식은 제어 설계 시 비선형 변환 매트릭스를 구성하는 핵심이다.
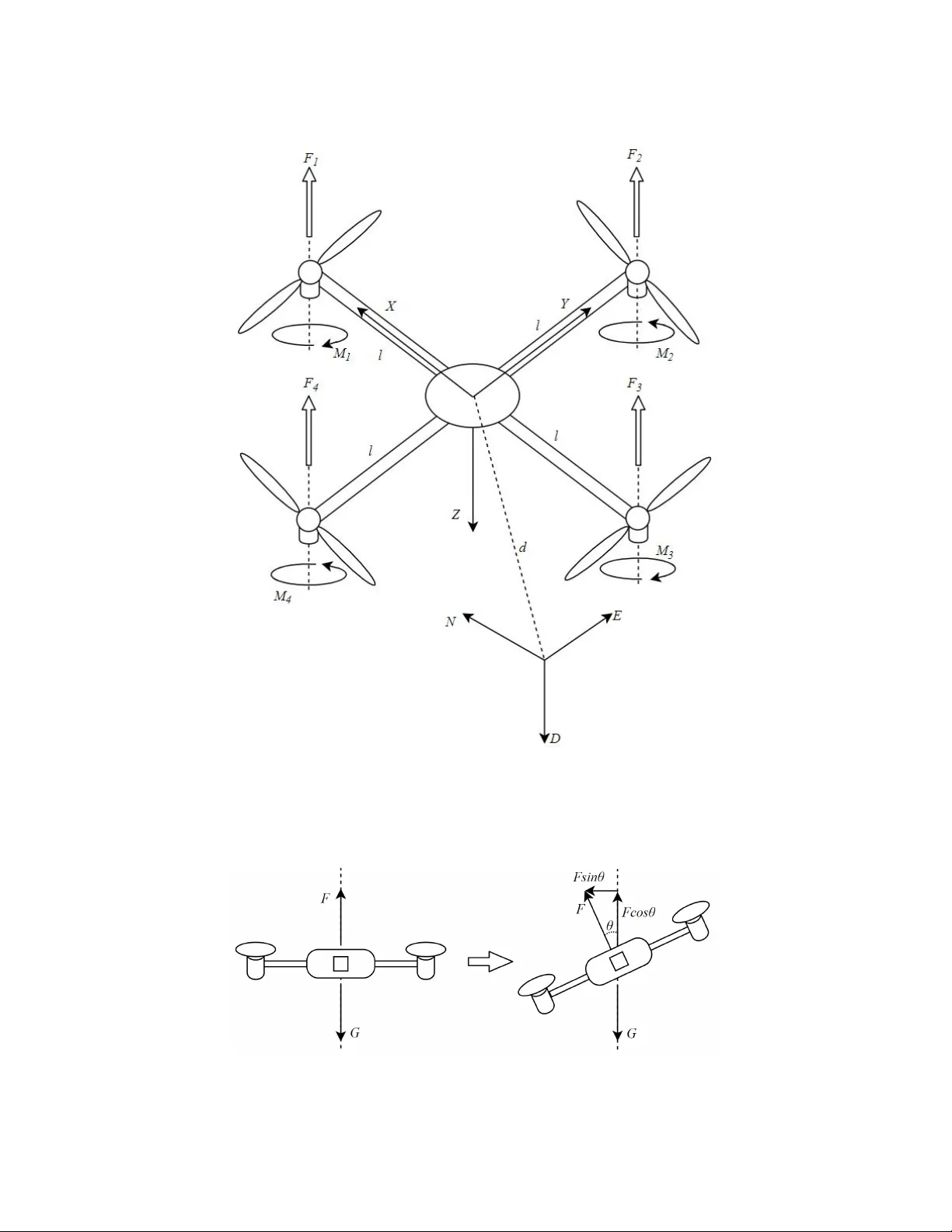
4장에서는 쿼드로터 시스템 모델링을 실제 기구에 적용한다. 먼저 기구 구조를 설명하고, 프로펠러 1·3은 시계방향, 2·4는 반시계방향으로 회전해 토크 균형을 맞춘다. 언더액추에이션을 극복하기 위해 롤·피치·요를 동시에 조절해 원하는 번역 운동을 만든다. 예를 들어 전진을 위해 피치 θ를 양의 값으로 만들면 추력의 수평 성분 \(F\sin\theta\)가 발생하고, 동시에 수직 성분 \(F\cos\theta\)가 감소하므로 고도를 유지하려면 전체 추력 F를 증가시켜야 함을 설명한다.
4.1절에서는 좌표계 정의와 변환 행렬을 정리한다. 관성계(N, E, D)와 몸체계(X, Y, Z)를 설정하고, Z‑Y‑X 순서의 회전 행렬을 이용해 몸체‑관성 변환 \(^{W}\mathbf{R}_B\)와 그 역행렬 \(^{B}\mathbf{R}_W\)를 명시한다.
4.2절에서는 뉴턴‑오일러 방정식을 적용해 번역 및 회전 운동을 기술한다. 질량 m, 중력 g, 관성 텐서 J, 총 추력 \(\mathbf{f}_b=
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기