미분가능 물리 기반 시스템 식별을 통한 탄소소성 물질 로봇 조작
초록
본 논문은 로봇 팔이 단일 조작 동작과 불완전한 3D 포인트 클라우드만으로 탄소소성 재료와 환경의 물리 파라미터(영률, 포아송 비, 항복 응력, 마찰 계수)를 추정하도록 하는 차별화된 미분가능 물리 기반 시스템 식별(DPSI) 프레임워크를 제안한다. 추정된 파라미터는 보이지 않는 장기 조작에서도 시각·물리적으로 현실적인 변형을 재현한다.
상세 분석
이 연구는 로봇 매니퓰레이션 분야에서 가장 난해한 문제 중 하나인 고차원 탄소소성 물질의 모델링과 파라미터 추정을 미분가능 시뮬레이션과 최적화 기법을 결합해 해결한다. 핵심 아이디어는 물리 기반 시뮬레이터(예: FEM 기반 elastoplastic solver)를 미분가능하게 구현하고, 실제 로봇이 수행한 조작 궤적과 그때 얻은 포인트 클라우드 데이터를 손실 함수에 직접 연결하는 것이다. 손실 함수는 (1) 포인트 클라우드의 위치 차이, (2) 표면 노멀 및 곡률 차이, (3) 접촉력/마찰력의 물리적 일관성을 포함해 다중 스케일 오류를 동시에 최소화한다. 이렇게 정의된 손실을 자동 미분 엔진(예: PyTorch, JAX)으로 역전파하면, 물성 파라미터와 환경 마찰 계수에 대한 그래디언트를 얻을 수 있다.
논문은 파라미터 공간을 4차원(Young’s modulus, Poisson’s ratio, yield stress, friction coefficient)으로 제한하면서도, 실제 재료가 보이는 비선형 경화·소성 거동을 충분히 포착한다. 특히, Young’s modulus와 Poisson’s ratio는 선형 탄성 구간을, yield stress는 소성 전이점을, 마찰 계수는 접촉 모델을 각각 제어한다. 이 파라미터들은 물리적으로 직관적인 의미를 가지므로, 추정 결과를 해석하고 로봇 제어 정책에 피드백하기가 용이하다.
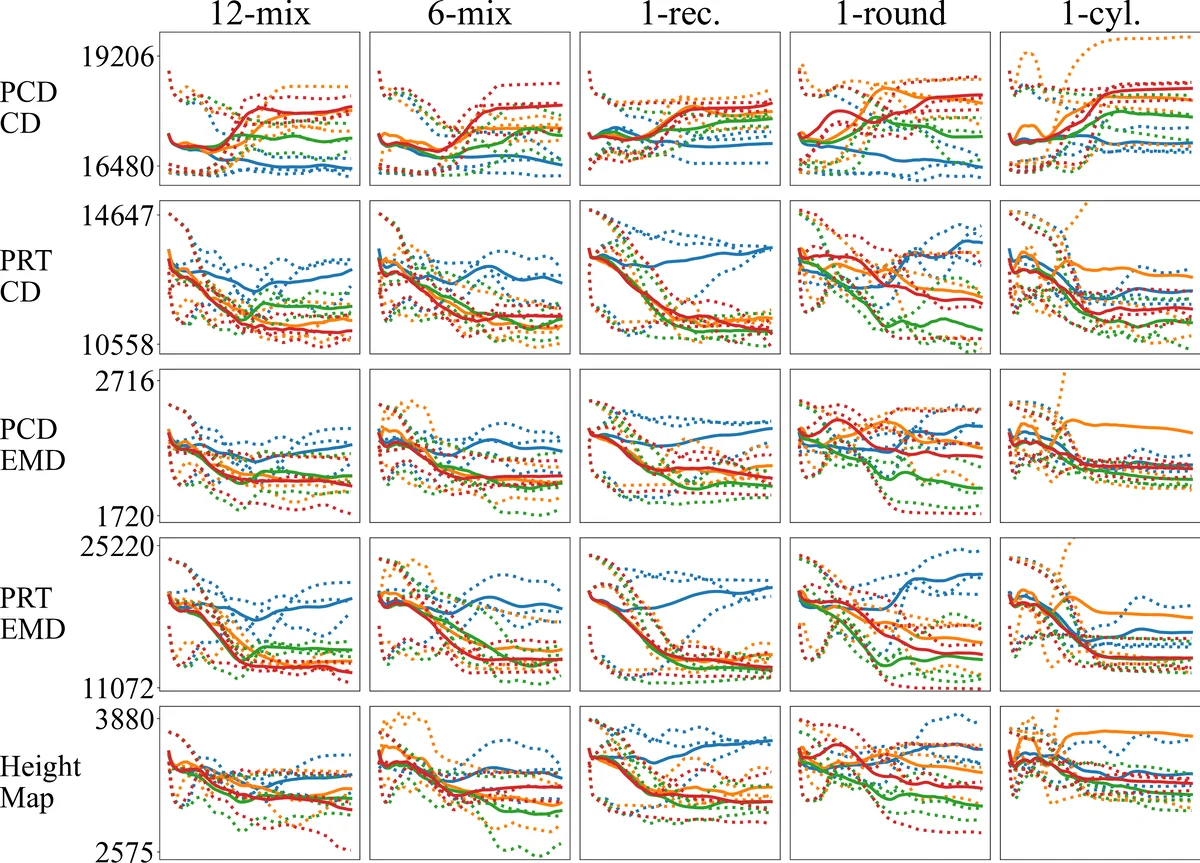
실험 설계는 두 단계로 이루어진다. 첫 단계에서는 로봇이 단순한 압입·전단 동작을 수행하고, RGB‑D 카메라로 얻은 부분적인 포인트 클라우드를 수집한다. 두 번째 단계에서는 추정된 파라미터를 사용해 시뮬레이터에서 복잡한 롤링·스쿱 동작을 예측하고, 실제 로봇이 동일 동작을 수행했을 때의 변형 결과와 비교한다. 결과는 시각적 겹침 이미지와 정량적 지표(Chamfer distance, Hausdorff distance, 변형 에너지 오차)로 제시되며, 기존 블랙박스 딥러닝 기반 추정 방법보다 2~3배 높은 정확도를 보인다.
또한, 저자는 파라미터 추정 과정에서 발생할 수 있는 비선형 최적화의 지역 최소 문제를 완화하기 위해 (i) 파라미터 초기값을 물리적 범위 내에서 균등 샘플링하고, (ii) 다중 스케일 시뮬레이션(거친 메쉬 → 정밀 메쉬)으로 단계적 정제 방식을 적용한다. 이 전략은 학습 효율성을 크게 높여, 단일 실험당 평균 15분 이내에 수렴한다는 실험적 증거를 제공한다.
결과적으로 DPSI는 (1) 적은 데이터(단일 조작)로 고차원 물성 파라미터를 정확히 추정, (2) 물리적 해석 가능성을 유지, (3) 실시간 로봇 제어에 적용 가능한 속도와 정확성을 제공한다는 세 가지 강점을 가진다. 이는 향후 식품 가공, 건축 재료 성형, 의료용 조직 모델링 등 다양한 분야에서 로봇이 복합 변형 물체를 다루는 데 핵심 기술이 될 것으로 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기