지도자 궤적 추적을 위한 모델‑독립형 분산 제어 알고리즘
** 본 논문은 방향성 스패닝 트리를 포함하는 고정·스위칭 네트워크에서, 파라미터 정보를 전혀 사용하지 않는 불연속형 분산 제어법을 제시한다. 제안 알고리즘은 리더의 비정상적인 가속도까지 포함한 임의의 궤적을 반영하며, 충분히 큰 스칼라 이득을 선택하면 반전역 지수 수렴을 보장한다. 연속 근사 버전은 실용적인 오차 조절이 가능하고, 스위칭 토폴로지에 대해서는 명시적인 체류시간 조건을 제시한다. **
저자: Mengbin Ye, Brian D.O. Anderson, Changbin Yu
**
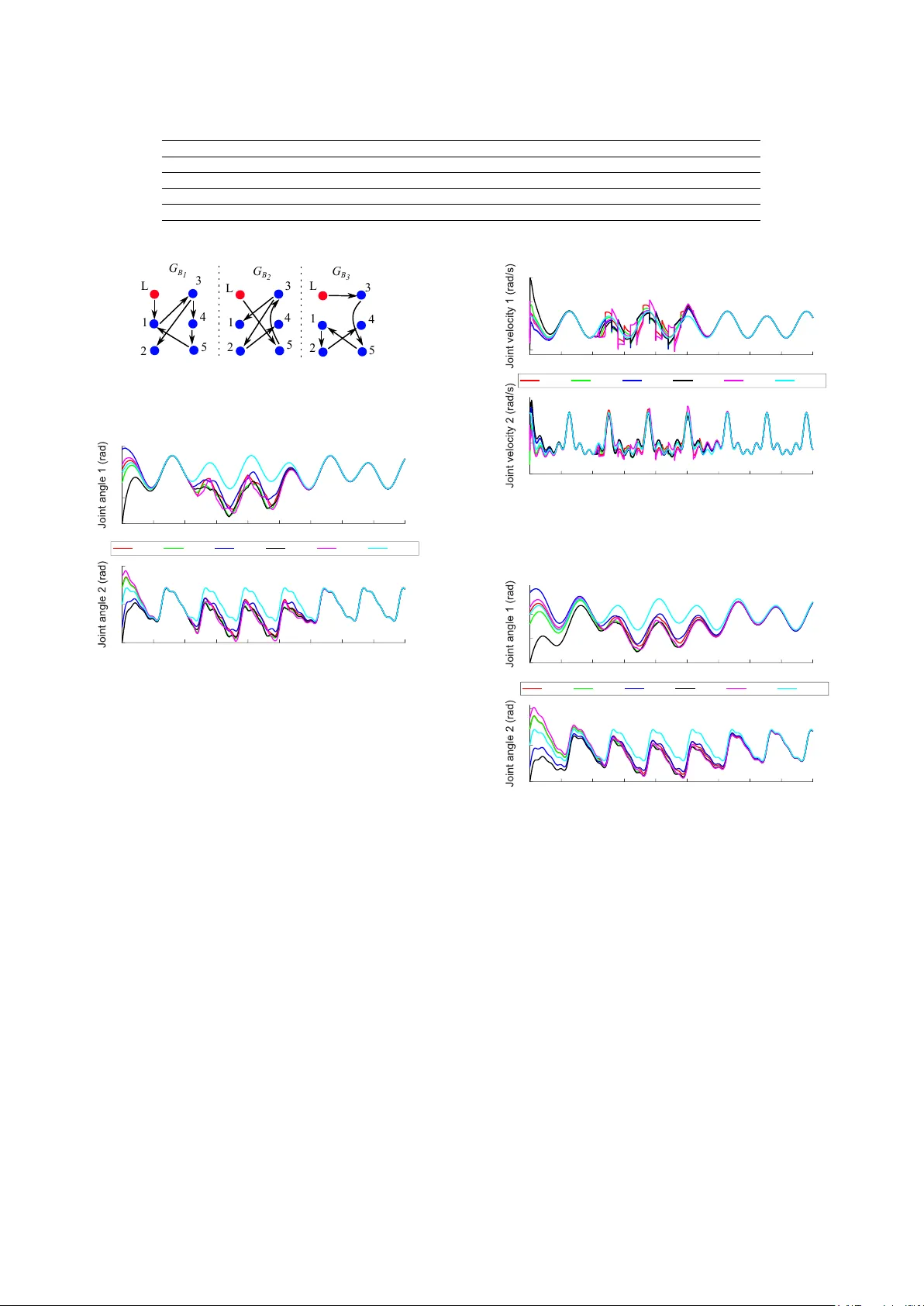
본 논문은 Euler‑Lagrange 방정식으로 기술되는 다관절 로봇, 전기·전기기계 시스템 등 다양한 물리적 시스템을 다루는 다중 에이전트 네트워크에서, **리더 궤적 추적** 문제를 모델‑독립적인 관점에서 해결한다. 연구는 크게 네 부분으로 구성된다.
1. **문제 정의 및 기존 연구와의 차별점**
- 에이전트는 완전 구동(full‑actuated)이며, 관성행렬 \(M_i(q_i)\), 코리올리·원심 행렬 \(C_i(q_i,\dot q_i)\), 중력항 \(g_i(q_i)\) 등에 대한 정확한 파라미터를 알 필요가 없다.
- 기존 모델‑의존적 방법은 파라미터를 정확히 알아야 하거나, 적응형 방법은 선형 파라미터화와 영구적 흥분(persistency of excitation) 조건을 필요로 한다.
- 방향성 그래프에서 움직이는 리더를 추적하는 연구는 거의 없으며, 특히 중력항을 포함한 일반적인 Euler‑Lagrange 시스템에 대한 해법이 부재했다.
2. **제안 알고리즘 및 수학적 설계**
- **불연속형 제어**: 각 에이전트 \(i\)는
\
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기