다관절 고장 로봇을 위한 비집게식 조작 기반 작업 영역 확장
초록
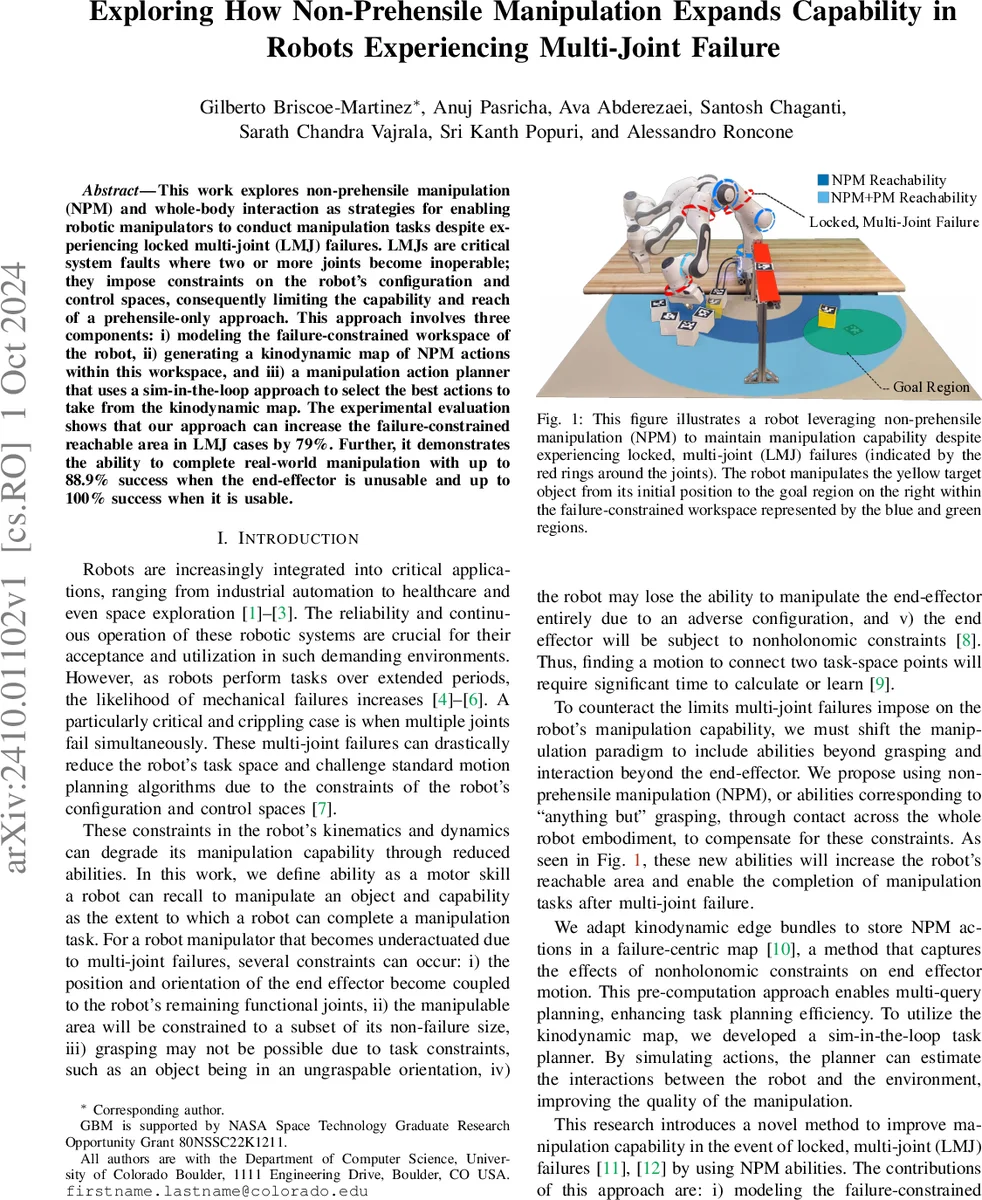
본 논문은 두 개 이상의 관절이 고정(잠김)되는 다관절 고장(LMJ) 상황에서, 로봇이 손끝 그리퍼만을 이용하는 전통적 조작 방식이 실패하는 문제를 해결하고자 비집게식 조작(NPM)과 전신-접촉 전략을 도입한다. 저자는 (1) 고장 제한 작업 공간을 모델링하고, (2) 해당 공간 내에서 가능한 NPM 행동을 동역학적으로 매핑한 ‘키노다이내믹 맵’을 사전 생성하며, (3) 시뮬레이션‑인‑루프 플래너를 통해 최적 행동을 선택한다. 실험 결과, 고장 제한 작업 영역을 평균 79 % 확대하고, 엔드‑이펙터가 사용 불가능한 경우 88.9 %·가능한 경우 100 %의 성공률을 달성하였다.
상세 분석
이 연구는 로봇 관절 고장이 발생했을 때 기존의 전통적 전시적(prehensile) 조작이 갖는 한계를 체계적으로 분석하고, 이를 보완하기 위한 비집게식(non‑prehensile) 조작 프레임워크를 제시한다. 첫 번째 단계에서는 고장된 관절들의 자유도가 사라짐에 따라 작업 공간이 비선형적으로 축소되는 현상을 수학적으로 정의하고, 이를 ‘Failure‑Constrained Workspace(FCW)’라 명명한다. 여기서 저자는 작업 공간을 2 cm 크기의 격자로 세분화하고, 각 격자에 대해 역기구학을 이용해 전시적 그립이 가능한지를 검사한다. 역기구학이 실패하면 ε‑볼 안에서 무작위 교란을 가해 재시도하고, 일정 횟수 이상 실패하면 전시적 제약을 완화해 비집게식 접촉점(손, 손목, 전완)으로 전환한다. 이렇게 구축된 ‘Reach‑Ability Map’은 고장 후 로봇이 실제로 도달할 수 있는 위치와 가능한 접촉 형태를 정량화한다.
두 번째 단계에서는 위 맵을 기반으로 ‘키노다이내믹 에지 번들(kinodynamic edge bundles)’을 생성한다. 이는 제한된 구성공간 C_c와 제어공간 U_c에서 무작위 초기 상태와 제어 입력을 샘플링해 Monte‑Carlo 방식으로 동역학 롤아웃을 수행하고, 충돌·속도 제한 등을 검사해 유효한 에지를 저장한다. 이 과정은 확률적 완전성을 보장하면서도 고장 조합이 복잡해지는 경우에도 사전 계산된 에지 집합을 통해 온라인 탐색 비용을 크게 감소시킨다.
세 번째 단계는 시뮬레이션‑인‑루프(planner)이다. 로봇이 목표 작업을 수행하기 위해 선택할 수 있는 행동 후보를 에지 번들에서 추출하고, 물리 시뮬레이터를 이용해 각 후보의 결과를 예측한다. 후보 선택 전략으로는 무작위(Random), 지연(Lazy), 탐욕(Greedy) 세 가지가 제시되며, 각각 시뮬레이션 호출 횟수와 성공 확률 사이의 트레이드오프를 제공한다. 특히 ‘Lazy’ 전략은 초기에는 최소한의 시뮬레이션만 수행하고, 필요 시에만 상세 검증을 진행함으로써 실시간 요구사항을 충족한다.
실험에서는 프랑카 엠리카 판다 로봇을 사용해 두 종류의 LMJ(두 관절 고정, 세 관절 고정) 상황을 재현하였다. 비집게식 ‘poking’ 원시 동작을 중심으로, 고장 전후 작업 영역을 비교했을 때 평균 79 %의 영역 확장이 확인되었다. 또한, 엔드‑이펙터가 완전히 비활성화된 경우에도 88.9 %의 성공률을, 엔드‑이펙터가 일부 사용 가능한 경우 100 %의 성공률을 기록하였다. 이는 전시적 조작만을 사용했을 때 0 %~30 % 수준에 머물던 결과와 크게 대비된다.
이 논문의 강점은 (1) 고장 상황을 사전 모델링해 작업 공간을 정량화한 점, (2) 키노다이내믹 맵을 통해 복잡한 동역학을 효율적으로 샘플링한 점, (3) 시뮬레이션‑인‑루프 플래너로 실제 물리 상호작용을 고려한 행동 선택이 가능하도록 한 점이다. 반면 제한점으로는 (①) 현재는 ‘poking’ 하나의 원시 동작에만 초점을 맞추어 다중 원시 동작(밀기, 굴리기 등)으로 확장하기 어려움, (②) 물리 시뮬레이션의 정확도에 크게 의존해 실제 환경에서의 전이 성능이 불확실함, (③) 실시간 고장 감지·재구성 메커니즘이 논문에 포함되지 않아 고장이 발생한 직후 즉시 적용하기엔 제한적이다. 또한 실험이 테이블탑 작업에 국한되어 복잡한 3D 환경이나 동적 장애물에 대한 검증이 부족하다. 향후 연구에서는 다중 원시 동작 라이브러리 구축, 시뮬레이션‑실제 전이 보정, 그리고 고장 감지·플래닝을 통합한 온‑디맨드 프레임워크가 필요할 것으로 보인다.
댓글 및 학술 토론
Loading comments...
의견 남기기