북미 고속도로 3만 km에서 독립형 및 RTK GNSS 성능 분석
초록
본 연구는 북미 고속도로 3만 km 구간에서 자동차용 단일 주파수 GNSS와 두 개의 서베이 등급 GNSS를 결합한 RTK 시스템의 정확도·가용성·연속성을 평가한다. 일반 내비게이션 GNSS는 도로 구분(5 m 이하) 요구를 98 % 가용성으로 만족하지만 차선 구분(1.5 m 이하)에서는 57 %에 머문다. 다주파수 RTK는 도로 구분 99.5 %, 차선 구분 98 %, 고속도로 차선 이탈 방지 91 % 가용성을 달성한다.
상세 분석
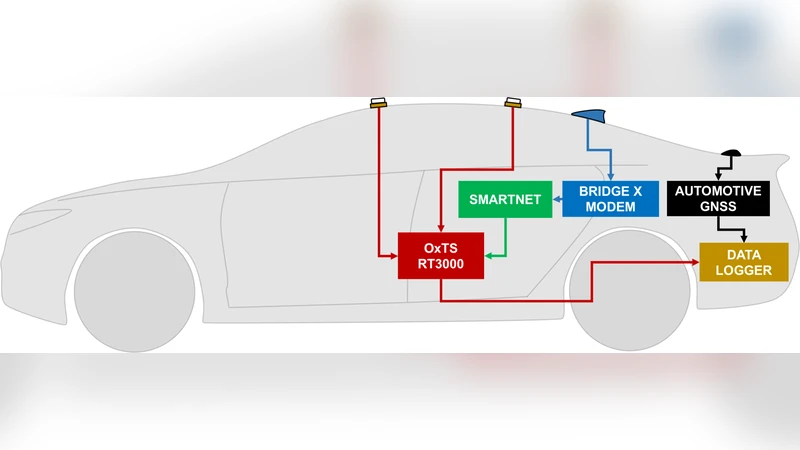
이 논문은 자동차용 GNSS 포지셔닝이 ADAS·V2X·자동운전에서 요구하는 정밀도 계층을 충족할 수 있는지를 실증적으로 검증한다. 연구팀은 30 000 km에 달하는 북미 고속도로 구간을 2대의 차량에 탑재한 장비로 주행하였다. 첫 번째 장비는 양산형 단일 주파수 GNSS 수신기로, 주로 턴‑바이‑턴 내비게이션에 사용되는 수준이다. 두 번째 장비는 두 개의 서베이 등급 GNSS 수신기와 전술 등급 IMU를 결합한 관성‑보정 시스템으로, 실시간으로 셀룰러 모뎀을 통해 RTK 고정(고정형)·플로트(부동형) 보정을 받아 ‘사실상’ 지상 진실값을 제공한다.
핵심 평가지표는 (1) 위치 오차, (2) 위성 가시성 및 기하학적 품질(DOP), (3) 포지션 타입(고정, 부동, 일반), (4) 네트워크 전송 지연에 따른 RTK 보정 지연이다. 데이터는 1 Hz 이상으로 수집돼, 각 구간별 평균·분산·누적 가용성을 산출하였다.
결과는 다음과 같다. 양산형 GNSS는 평균 수평 오차가 2.3 m이며, 위성 가시성은 평균 7.8개, GDOP 평균 2.1로 비교적 양호했지만, 급격한 전파 차단(터널·고가교 등) 구간에서 연속성이 크게 저하돼 차선 수준(≤1.5 m) 요구를 57 % 가용성으로만 충족했다. 반면, 다주파수 RTK는 평균 수평 오차 0.28 m, 고정형 포지션 가용성이 91 %에 달했으며, 보정 지연 평균 150 ms로 실시간 제어에 충분히 빠른 것으로 나타났다. 특히, 위성 기하학이 열악한 지역에서도 두 개의 주파수(L1/L5)와 다중 GNSS( GPS·GLONASS·Galileo·BeiDou) 활용으로 DOP을 1.4 이하로 유지했다.
또한, 네트워크 지연 분석에서 셀룰러 4G LTE 평균 RTT가 85 ms, 5G 비동적 모드에서는 45 ms로, RTK 고정 유지에 큰 영향을 주지 않았다. 다만, 커버리지가 제한된 시골 지역에서는 보정 패킷 손실률이 3 % 수준으로 상승해 고정형 전환이 지연되는 현상이 관찰되었다.
이러한 정량적 결과는 현재 양산형 GNSS가 도로 구분 수준에서는 충분히 활용 가능하지만, 차선 수준·고속 차선 이탈 방지와 같은 고정밀 요구에는 다주파수 RTK가 필수임을 시사한다. 또한, 셀룰러 기반 RTK 보정 서비스의 지연·손실 특성을 고려한 시스템 설계가 필요함을 강조한다.
댓글 및 학술 토론
Loading comments...
의견 남기기