동적 연합 사이버물리 시스템을 위한 타이밍 API TickTalk
초록
TickTalk은 사이버물리 시스템(CPS)에서 시간과 동기화 요구를 프로그래밍 언어 수준에서 다루기 위한 프레임워크이다. 언어, 시스템, 네트워크, 디바이스 네 계층에 걸쳐 가변 정밀도의 동기화 섬을 동적으로 연합하고, 타이밍 제약을 중간 표현으로 통합한다. 이를 통해 개발자는 코드 블록의 시간 의도를 선언만 하면 런타임과 네트워크가 자동으로 정확한 동기화와 전력 효율을 제공한다.
상세 분석
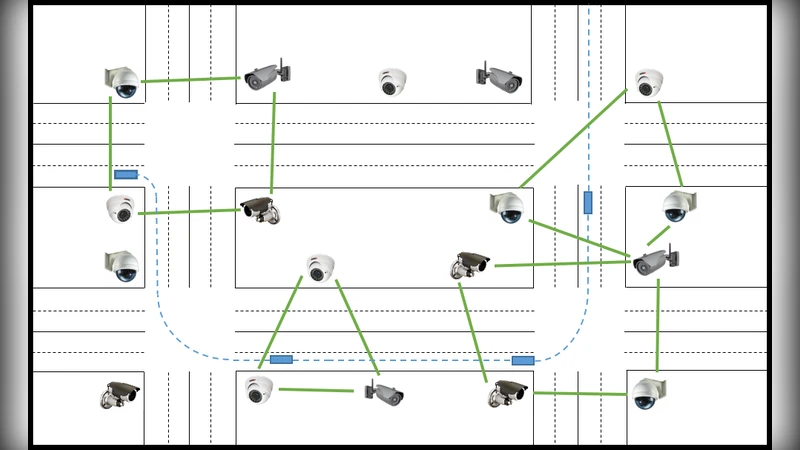
TickTalk 논문은 현재 IoT·스마트시티와 같은 대규모 CPS에서 가장 큰 설계 난관 중 하나인 “시간·동기화” 문제를 언어 차원에서 해결하려는 시도를 체계적으로 제시한다. 첫 번째 핵심은 동적으로 연합되는 섬(island) 개념이다. 기존 연구는 정적인 클러스터나 고정된 리더 기반 동기화에 머물렀지만, 저자는 이동하는 객체(예: 트럭) 주위에 순간적으로 형성되는 카메라 군집을 ‘섬’으로 보고, 이 섬이 시간에 따라 재구성될 수 있도록 설계하였다. 이를 위해 **가변 정밀도(syntonization)와 동시성(simultaneity)**을 구분하고, 각 섬마다 독립적인 기준 시계(reference clock)를 할당한다.
두 번째로 제시된 **중간 언어(intermediate language, IL)**는 프로그램 로직과 타이밍 제약을 하나의 그래프 형태로 표현한다. 노드는 “코드 블록 인스턴스”이며, 엣지는 데이터 흐름과 동시에 “동기화 토큰”을 전달한다. 이 구조는 기존 데이터플로우 기반 컴파일러와 호환되면서, 타이밍 제약을 정형 검증에 포함시킬 수 있게 한다. 특히, 동시 실행 블록에 대한 토큰 기반 스케줄링은 WCET, 네트워크 지연, 클럭 드리프트 등을 런타임에 동적으로 보정하도록 설계돼 있다.
네트워크 계층에서는 PTP/IEEE‑1588과 같은 고정밀 시계 프로토콜을 활용하되, 전력 제한 디바이스를 위해 다중 레벨 동기화를 제안한다. 즉, 모든 디바이스가 UTC에 지속적으로 동기화되는 것이 아니라, 필요 시에만 고정밀 동기화를 요청하고 평시에는 저전력 로컬 클럭만 유지한다. 이는 “wake‑up‑just‑in‑time” 전략과 결합돼 배터리 수명을 크게 연장한다.
디바이스 수준에서는 클럭 가상화 개념을 도입한다. 서로 다른 애플리케이션이 동일한 센서를 공유할 때 각 코드 블록이 독립적인 가상 클럭을 가질 수 있게 함으로써, 충돌 가능한 타이밍 요구를 런타임이 조정한다. 이는 전통적인 가상화가 CPU와 메모리만 격리하는 데 비해, 시간 자원까지 격리한다는 점에서 혁신적이다.
마지막으로 논문은 멀티‑테넌시와 코드 블록 매핑 문제를 다루며, 타이밍 의도를 선언형으로 기술하면 컴파일러와 런타임이 자동으로 충돌 탐지·조정·스케줄링을 수행한다는 비전을 제시한다. 전체적으로 TickTalk은 언어 설계, 중간 표현, 네트워크 프로토콜, 하드웨어 지원까지 포괄적인 스택을 제시함으로써, CPS 개발자가 “시간을 프로그래밍”할 수 있는 실질적인 기반을 마련한다.
댓글 및 학술 토론
Loading comments...
의견 남기기