자율주행 자동차 핵심 요소 총정리
본 논문은 자율주행 자동차(AC)의 핵심 구성 요소를 체계적으로 정리한다. SAE 기준의 자동화 레벨, 주요 센서와 하드웨어, 소프트웨어 모듈(인식·위치·예측·계획·제어), 공개 데이터셋, 산업 선도 기업, 적용 분야 및 현재 직면한 기술·윤리적 과제를 포괄적으로 소개한다.
저자: Rui Fan, Jianhao Jiao, Haoyang Ye
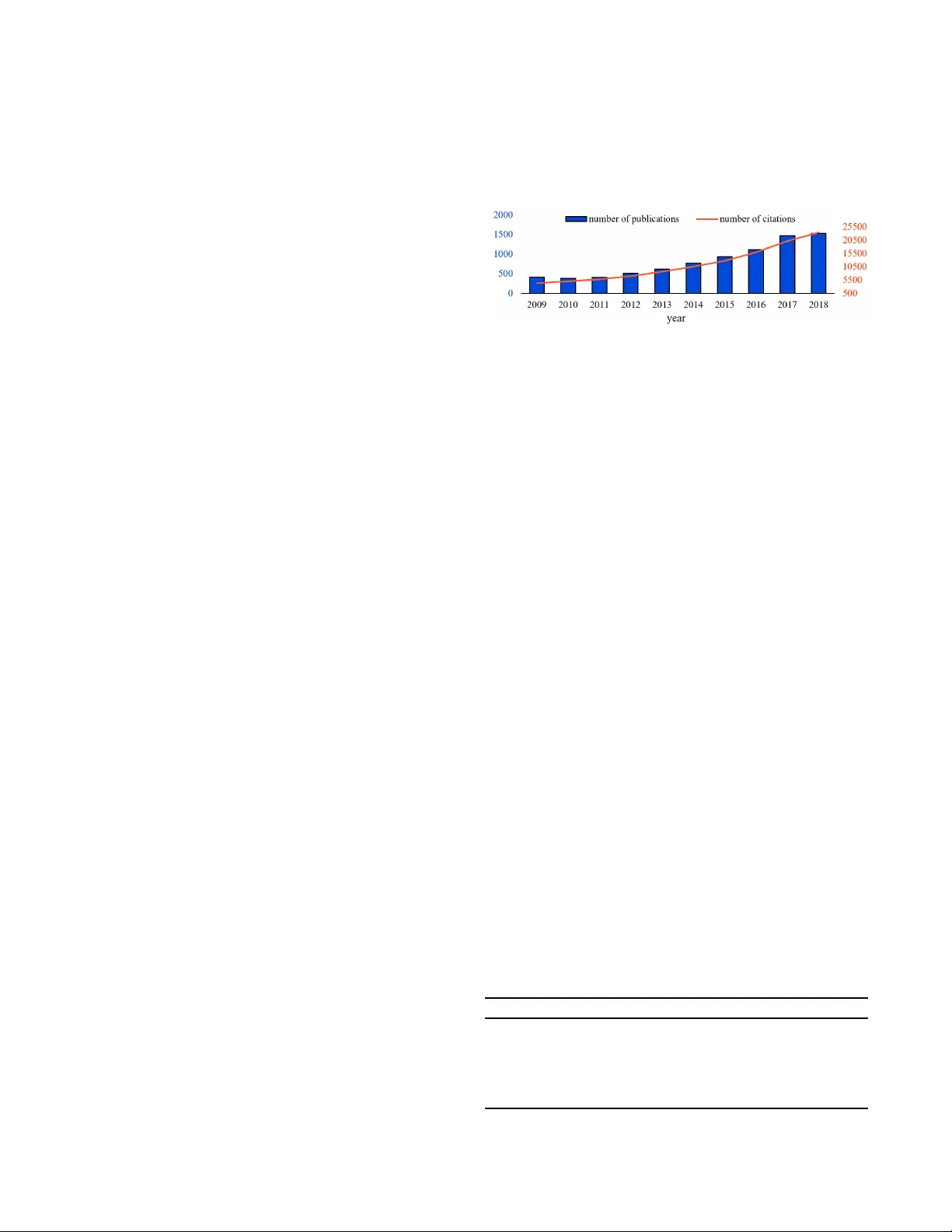
본 논문은 자율주행 자동차(Autonomous Car, AC)의 핵심 구성 요소를 포괄적으로 정리하고, 현재 연구 및 산업 현황을 조망한다. 서론에서는 지난 10년간 자율주행 관련 논문이 급증했으며, 대부분이 특정 기술 영역(예: ADAS, 차량 제어, 시각 인식)에 국한돼 있다는 점을 지적한다. 이에 따라 전체 시스템을 한눈에 파악할 수 있는 종합적인 리뷰의 필요성을 제시한다.
II 장에서는 AC 시스템의 기본 구조를 설명한다. 자동화 레벨은 SAE J3016 표준에 따라 0~5단계로 구분되며, 레벨 4·5에서는 인간 운전자의 개입이 전혀 필요하지 않다. 현재 상용화된 대부분의 시스템은 레벨 2·3에 머물러 있으며, 완전 자율화에는 아직 상당한 시간이 소요될 것으로 전망한다.
센서 파트에서는 카메라(패시브), 라이다·레이다·초음파(액티브)와 GPS·IMU·휠인코더 등 보조 센서를 상세히 나열한다. 각 센서는 샘플링 레이트, 시야(FoV), 정확도, 탐지 거리, 비용 등의 트레이드오프를 가지고 있어, 실제 차량 설계 시 목적에 맞는 조합이 필요함을 강조한다. 예를 들어 라이다는 고정밀 3D 지도 작성에 유리하지만 비용이 높고, 레이더는 금속 물체 탐지와 장거리 측정에 강점이 있다.
하드웨어 제어 장치는 토크 스티어링 모터, 전자식 브레이크 부스터, 전자식 스로틀, 기어 변속기, 주차 브레이크 등으로 구성된다. 차량 상태(휠 속도, 조향 각도 등)는 CAN 버스를 통해 실시간으로 ECU에 전달되며, 이를 기반으로 ADS가 제어 명령을 전송한다.
III 장에서는 소프트웨어 아키텍처를 다섯 개 모듈(인식, 위치·지도, 예측, 계획, 제어)로 재구성한다. 기존 Stanley, Junior, Boss, Tongji 등 다양한 아키텍처를 비교한 뒤, 가장 일반적인 흐름을 도식화한다.
- 인식 모듈: 카메라 기반 컴퓨터 비전(기하학 모델링)과 딥러닝(CNN, SegNet, U‑Net) 접근을 모두 다루며, 라이다·레이다와의 멀티센서 융합이 중요함을 언급한다.
- 위치·지도 모듈: SLAM을 필터 기반(Extended Kalman Filter, Unscented Kalman Filter, Particle Filter)과 최적화 기반(Bundle Adjustment, Graph SLAM)으로 구분하고, 각각의 수학적 원리와 적용 사례를 제시한다.
- 예측 모듈: 모델 기반(칼만 필터, 물리 기반 kinematic 모델)과 데이터 기반(HMM, Bayesian Network, Gaussian Process, Inverse Reinforcement Learning) 방법을 비교한다. 특히 보행자·자전거와 같은 비정형 교통 주체의 궤적 예측에 AI 기술이 활용되는 현황을 설명한다.
- 계획 모듈: 경로 계획(다익스트라, A*, State Lattice), 동작 계획(교통 규칙·상황 고려), 궤적 생성(시간 연속적인 차량 상태 시퀀스)으로 단계화한다.
- 제어 모듈: PID, LQR, MPC 등 세 가지 제어 전략을 소개하고, 실제 시스템에서는 이들을 혼합해 사용한다는 점을 강조한다(예: Baidu Apollo는 PID + LQR + MPC를 조합).
IV 장에서는 공개 데이터셋을 정리한다. Cityscapes는 픽셀‑레벨 세그멘테이션에 특화됐으며, ApolloScape는 시나리오 파싱·차량 인스턴스·차선·자기위치·궤적 추정 등 다목적 데이터를 제공한다. KITTI는 스테레오·광류·객체 검출·트래킹·오도메트리·세그멘테이션을 포괄하고, 6D‑vision은 스테레오 카메라 기반 3D 인식을 제공한다.
V 장에서는 산업 리더를 소개한다. Tesla, Waymo, GM 등은 대규모 투자와 실도로 테스트를 진행하고 있으며, Waymo는 800만 마일 이상 주행, GM은 사고율 감소 효과를 보고했다. 또한, 대학 연구팀과 협업해 기술 이전 및 인재 양성에 기여하고 있음을 언급한다.
VI 장에서는 자율주행 기술의 적용 사례를 제시한다. 택시·버스·배송 차량 외에도 도로 품질 검사·수리 차량, 스마트 교통 관리 등 다양한 분야에서 활용 가능성을 제시한다.
VII 장에서는 현재 남아 있는 도전 과제를 논의한다. 악천후·조도 변화에 취약한 인식, 고연산량으로 인한 실시간 처리 한계, 대규모 SLAM의 장기 불안정성, 센서 융합 비용·복잡성, 윤리·사회적 수용성(책임 소재·프라이버시) 등이 주요 이슈로 제시된다.
결론에서는 논문의 전체 흐름을 요약하고, 향후 연구는 보다 통합된 하드웨어‑소프트웨어 설계, 비용 효율적인 센서 패키징, 실시간 고성능 알고리즘, 그리고 규제·윤리 프레임워크 정립에 초점을 맞춰야 한다고 제언한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기