이산시간 선형 시스템을 위한 복원탄성 상태 추정기
본 논문은 프로세스 노이즈는 유계, 측정 노이즈는 밀집·임펄시브(희소) 두 형태가 동시에 존재하는 이산시간 LTI 시스템에 대해, 동적 잔차의 제곱합과 측정 잔차의 ℓ₁‑노름을 결합한 볼록 성능 함수를 최소화하는 집합값 추정기를 제안한다. 관측가능성 가정 하에 정의된 r‑탄성 지수 p₍r₎가 ½ 미만이면, 공격·결함 등으로 발생하는 임펄시브 노이즈의 진폭에 무관하게 추정 오차가 유계임을 정리한다.
저자: Alex, re Kircher, Laurent Bako
1. 서론
본 논문은 사이버‑물리 시스템(CPS)에서 센서 데이터가 패킷 손실, 악의적 공격, 일시적 결함 등으로 인해 임펄시브(희소) 노이즈에 노출되는 현실적인 상황을 다룬다. 기존 연구는 (i) 공격받는 센서 수를 고정하거나, (ii) 프로세스·측정 노이즈를 전혀 고려하지 않는 등 제한적인 가정을 두었다. 저자는 이러한 제약을 완화하고, 프로세스 노이즈는 유계, 측정 노이즈는 밀집·임펄시브 두 형태가 동시에 존재하는 일반적인 LTI 이산시간 시스템을 대상으로 탄성(state‑resilient) 추정기를 설계한다.
2. 문제 정의
시스템 모델은
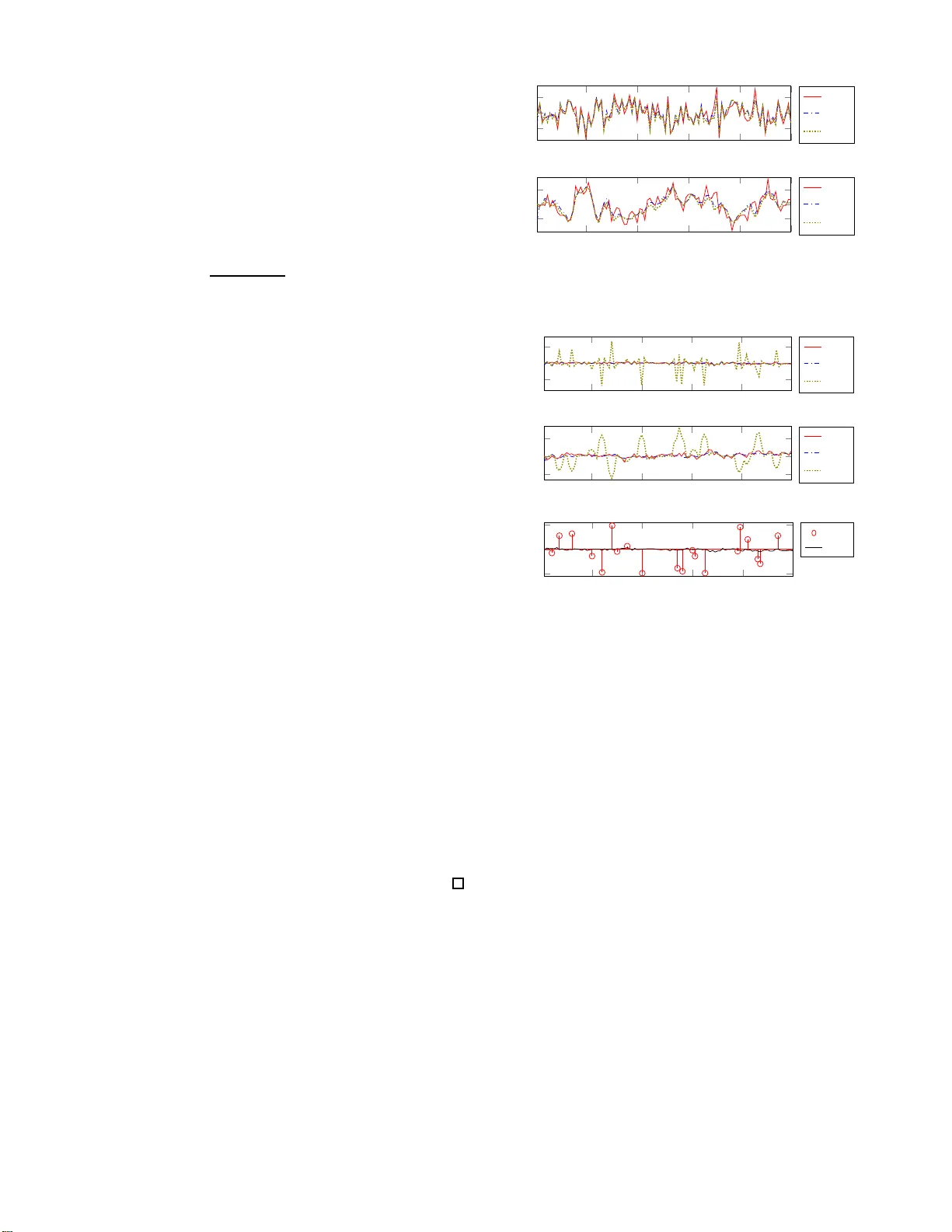
xₜ₊₁ = A xₜ + wₜ, yₜ = C xₜ + fₜ, t = 0,…,T‑1
이며, wₜ는 유계(작은) 프로세스 노이즈, fₜ는 일반적인 밀집 노이즈와 드물게 큰 값을 갖는 임펄시브 노이즈의 합으로 본다. 목표는 주어진 측정 시퀀스 Y = {y₀,…,y_{T‑1}} 로부터 상태 궤적 X = {x₀,…,x_{T‑1}} 를 추정하되, 임펄시브 노이즈의 진폭에 무관하게 오차가 유계가 되도록 하는 것이다.
3. 제안된 추정기
성능 함수 F(Z)를 다음과 같이 정의한다.
F(Z) = λ ∑_{t∈T′}‖z_{t+1} – A z_t‖₂² + ∑_{t∈T}‖y_t – C z_t‖₁, λ>0
여기서 Z =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기