자율주행차 위치 정확도 요구사항 분석
본 논문은 자율주행차가 안전하게 차선을 유지하고 도로 레벨을 인식하기 위해 필요한 위치·자세 정확도와 무결성(Integrity) 기준을, 항공·철도에서 사용되는 10⁻⁸ 실패/시간 수준을 기준으로 도출한다. 미국 도로 설계 규격과 차량 치수를 이용해 고속도로와 도시도로 각각에 대한 가로·세로·수직 오차 한계와 자세 오차 한계를 제시한다.
저자: Tyler G. R. Reid, Sarah E. Houts, Robert Cammarata
본 논문은 자율주행차가 안전하게 운행되기 위해 반드시 충족해야 하는 위치·자세 정확도와 무결성 요구사항을 체계적으로 도출한다. 서론에서는 자율주행차가 차선 내에 머무르는 것이 가장 기본적인 안전 목표이며, 이를 위해 가로(측면), 세로(전후), 수직(고도) 3축의 위치 오차와 자세(roll, pitch, yaw) 오차를 동시에 관리해야 함을 제시한다. 기존 연구에서는 ‘which‑road(≤5 m)’, ‘which‑lane(≤1.5 m)’, ‘where‑in‑lane(≤1.0 m)’ 정도의 정확도만을 요구했지만, 본 논문은 완전 자율(Level 3+)을 전제로 하여 차선 유지와 능동 제어를 위한 ‘0.1 m 이하’ 수준까지 요구한다.
첫 번째 핵심 단계는 안전 무결성 수준(Safety Integrity Level, SIL)을 정의하는 것이다. 2016년 미국 도로 사망률을 1.18 × 10⁻⁸ fatalities/마일로 측정하고, 항공 분야에서 달성한 2 × 10⁻¹⁰ fatalities/마일 수준(≈100배 개선)을 목표로 설정한다. 이를 시스템 전체 실패 확률(TLS)로 환산하면 2 × 10⁻¹⁰ fatal crashes/vehicle‑mile가 된다. 항공에서 사용되는 PF : I = 1 : 10 비율을 차용해, 자율주행 시스템 전체 위험을 서브시스템(센서, 데이터 처리, 제어 등)별로 할당한다.
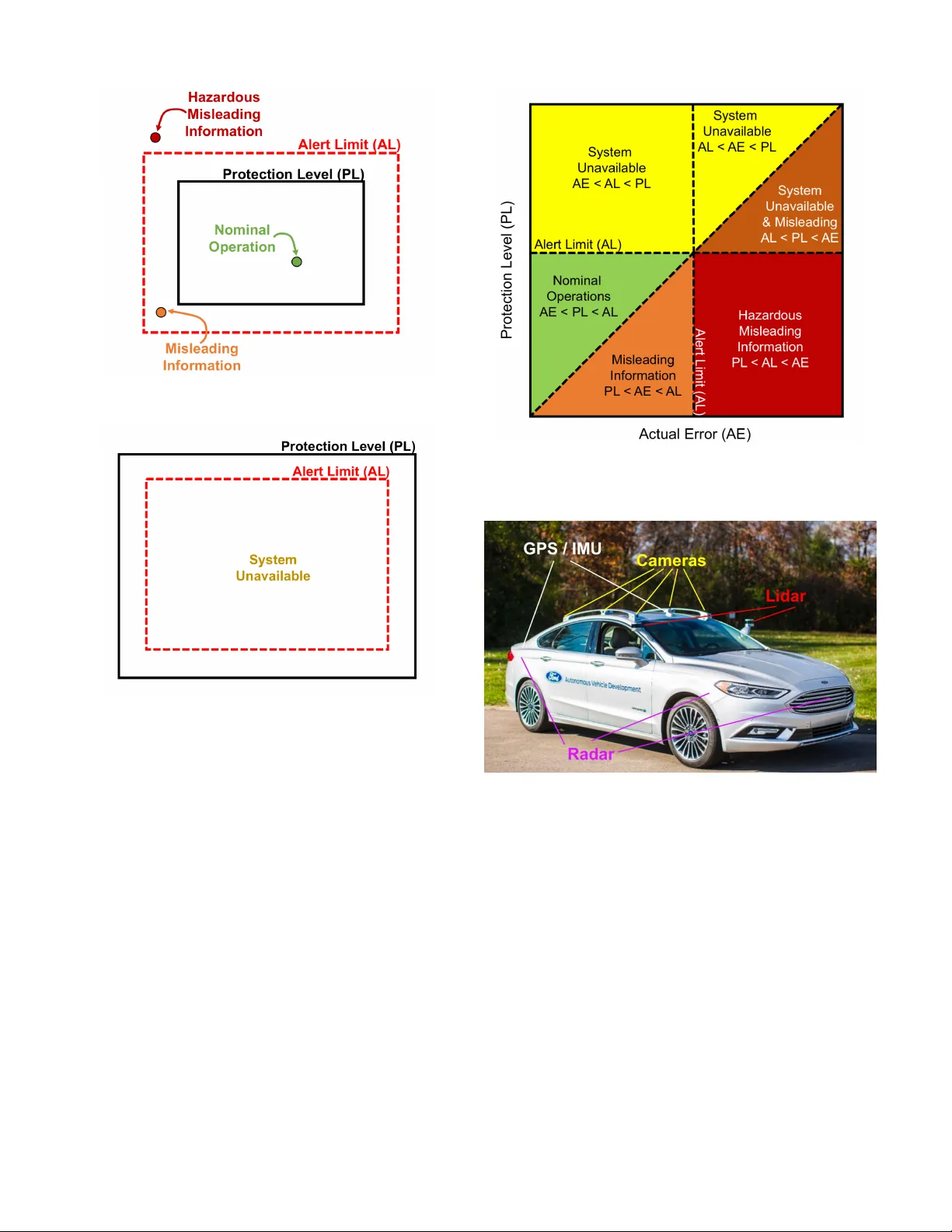
두 번째 단계는 ‘위치 기하학’ 분석이다. 미국 연방 도로 설계 규격(AASHTO)을 기반으로 차선 폭을 3.6 m, 최소 곡률 반경을 300 m 등으로 가정하고, 차량 폭·길이(예: 승용차 1.8 m × 4.5 m)를 고려해 보호 수준(Protection Level, PL)과 경보 한계(Alert Limit, AL)를 수식화한다. 고속도로에서는 차선 폭이 넓고 곡률이 완만하므로 가로 오차 0.57 m(95 % 신뢰구간 0.20 m), 세로 오차 1.40 m(0.48 m), 수직 오차 1.30 m(0.43 m), 자세 오차 1.5°(0.51°)가 허용된다. 반면 도시·주거 도로는 차선이 좁고 급격한 커브가 많아 가로·세로 오차 0.29 m(0.10 m), 자세 오차 0.5°(0.17°)로 더 엄격한 기준이 필요하다. 이러한 수치는 ‘차량이 언제든 차선 내에 머무를 수 있는 최소 여유’를 보장하기 위한 설계값이다.
무결성(Integrity) 개념은 보호 수준이 경보 한계를 초과할 경우 발생하는 ‘오용(misleading information)’과 ‘위험한 오용(hazardous misleading information)’을 방지하기 위한 통계적 보증이다. 95 % 정확도는 일반적인 운행 상황을 의미하고, 무결성은 극단적인 상황(오류 꼬리)에서의 오류 확률을 10⁻⁸ / 시간 이하로 제한한다. 따라서 시스템은 100 % 가용성(Availability)을 유지해야 하며, 보호 수준이 경보 한계 이하일 때만 자율 주행 모드를 유지한다.
다음으로 센서 융합 구조를 살펴본다. 현재 포드의 연구 차량은 GNSS, IMU, LiDAR, 레이더, 카메라 등 5가지 주요 센서를 사용한다. GNSS는 전역적인 수평 위치를 제공하지만 도시 협소 지역이나 터널에서는 신호 차단이 발생한다. IMU는 단기적인 관성 측정을 제공해 GNSS가 일시적으로 끊길 때 보완하지만 드리프트가 누적된다. LiDAR와 카메라는 차선·도로 경계 인식에 뛰어나지만 눈·비·안개 등 악천후에서는 신뢰도가 떨어진다. 레이더는 날씨에 강하지만 해상도가 낮아 정밀한 차선 인식에 한계가 있다. 따라서 ‘센서·알고리즘·인프라(고정밀 지도·GNSS 차분 보정)’ 삼각합이 없이는 논문에서 제시한 무결성·정밀도 요구사항을 만족하기 어렵다.
마지막으로 실용적 구현 과제를 논의한다. 고정밀 지도와 실시간 GNSS 차분 보정(RTK, RTK‑Network) 서비스는 대규모 상용화를 위해 비용 효율적인 배포가 필요하다. 차량 수준에서는 고성능 CPU·GPU와 대용량 저장소가 요구되며, 이는 차량 가격에 직접적인 영향을 미친다. 따라서 연구 단계에서는 ‘데시미터 수준 정확도’를 달성하기 위해 센서 비용 절감(예: 저가 LiDAR), 알고리즘 최적화(경량 딥러닝), 그리고 인프라 공유(클라우드 기반 지도 업데이트) 등을 병행해야 함을 강조한다.
결론적으로, 본 논문은 자율주행차가 인간 운전자를 대체하기 위해서는 현재 항공·철도 수준의 무결성(10⁻⁸ / 시간)과 도로 기하학에 기반한 가로·세로·수직·자세 오차 한계를 만족해야 함을 수학적으로 증명한다. 이를 위해 다중 센서 융합, 고정밀 지도, 실시간 GNSS 보정 등 복합적인 기술 스택이 필요하며, 비용·인프라·컴퓨팅 자원의 균형을 맞추는 것이 향후 상용화의 핵심 과제임을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기