비선형 시스템의 적응 도착 비용을 이용한 이동 지평선 추정기의 강건 안정성
본 논문은 비선형 검출 가능 시스템에 대해 적응형 도착 비용을 적용한 이동 지평선 추정기(MHE)의 강건 전역 점근 안정성(RGAS)과, 교란이 사라질 경우 추정값이 실제 상태로 수렴함을 증명한다. 적절히 설계된 사전 가중치 업데이트 규칙을 통해 사전 가중치의 상한·하한을 사전에 보장하고, i‑IOSS 특성을 이용해 추정 오차를 KL‑함수와 K‑함수 형태로 바인딩한다. 시뮬레이션을 통해 기존 MHE 방식과 비교해 제안 방법의 우수성을 확인한다.
저자: Nestor N. Deniz, Marina H. Murillo, Guido Sanchez
본 연구는 비선형 이산시간 시스템 xₖ₊₁ = f(xₖ,wₖ), yₖ = h(xₖ)+vₖ에 대해, 프로세스 잡음 wₖ와 측정 잡음 vₖ가 유계임을 전제로 한다. 시스템이 증분 입력‑출력‑상태 안정(i‑IOSS) 특성을 만족한다면, 적응형 도착 비용을 이용한 이동 지평선 추정기(MHE)의 강건 전역 점근 안정성(RGAS)과 교란이 사라질 경우 실제 상태로의 수렴을 보장할 수 있다.
논문은 먼저 기존 MHE 연구들을 검토한다. 전통적인 MHE는 최소제곱 비용에 최대항을 추가하거나 사전 가중치를 임의로 설정하는 방식으로 강건성을 확보했지만, 이러한 방법은 가중치 선택이 어려워 실시간 적용에 제약이 있었다. 이를 극복하기 위해 저자들은 도착 비용 Γₖ₋ₙ(·)을 적응적으로 업데이트하는 알고리즘(식 5)을 제안한다. 이 알고리즘은 이전 추정값 \hat xₖ₋ₙ와 실제 측정값 yₖ₋ₙ을 이용해 가중치 행렬 Pₖ₋ₙ를 재귀적으로 계산하며, 모델에 대한 사전 지식 없이도 행렬이 양정정, 감소, 유계임을 보장한다.
다음으로, 논문은 세 가지 핵심 가정을 제시한다. 가정 1은 도착 비용이 K∞‑함수 γ_p와 \barγ_p에 의해 상·하한이 잡히며, 다항적 성장조건 γ_p(r) ≥ c_p r^a, \barγ_p(r) ≤ \bar c_p r^a를 만족한다. 가정 2는 i‑IOSS에서 도출되는 KL‑함수 β가 β(r,s) ≤ c_β r^p s^{‑q} 형태임을 명시한다. 가정 3은 단계 비용 ℓ(w,v) 가 K∞‑함수 γ_w, γ_v와 그 상한 \barγ_w, \barγ_v에 의해 양쪽으로 제한된다는 점을 강조한다. 이러한 가정들은 이후 정리 1의 증명에 필수적인 바운드들을 제공한다.
정리 1에서는 MHE의 최적 비용 Ψ*가 사전 가중치와 단계 비용의 합으로 표현됨을 보이고, 최적해와 실제 상태·교란 사이에 KL·K 형태의 바운드가 존재함을 증명한다. 구체적으로, 최적 비용의 상·하한을 이용해 추정된 초기 상태 \hat xₖ₋ₙ와 실제 초기 상태 xₖ₋ₙ 사이의 차이를 γ_p⁻¹·\barγ_p·|·| 형태로 제한한다. 단계 비용의 경계조건을 통해 추정된 프로세스 잡음 \hat w_j와 측정 잔차 \hat v_j도 유사한 K‑함수 형태로 제한된다. i‑IOSS 정의에 의해 시스템 상태 차이는 β·|·| + γ₁·‖w‖ + γ₂·‖v‖ 로 표현되며, 여기서 β, γ₁, γ₂는 가정 2·3에 의해 결정된 K·KL 함수이다. 최종적으로 식 (14)와 동일한 형태의 오류 바운드가 도출되어, MHE가 RGAS임이 증명된다. 교란 시퀀스가 수렴(C_w, C_v)하면, K‑함수 π_w, π_v가 0으로 수렴하므로 추정오차는 점점 감소해 실제 상태에 수렴한다.
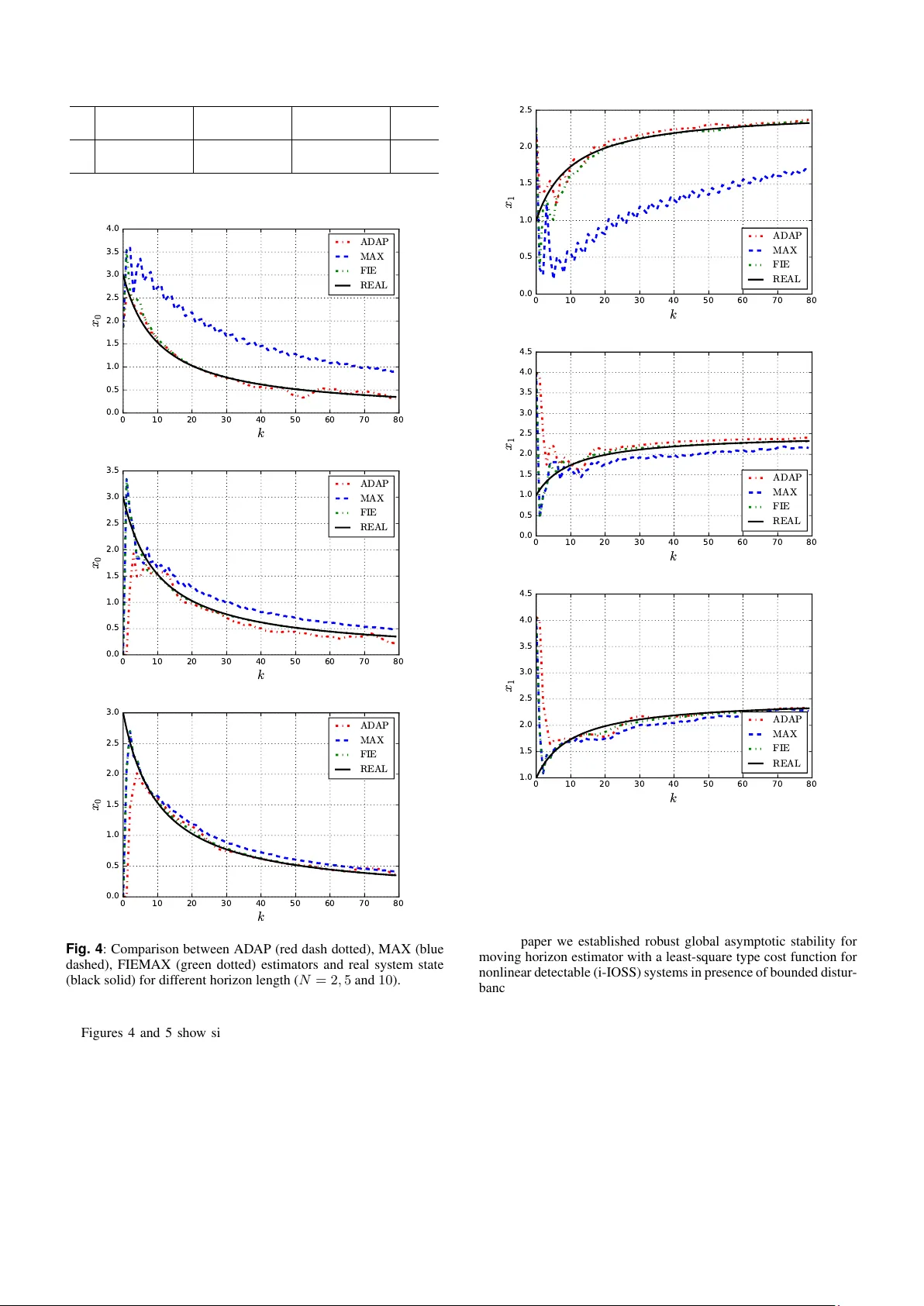
시뮬레이션 부분에서는 두 가지 비선형 모델(예: 2자유도 로봇 팔, 비선형 화학 반응기)을 사용하고, 교란이 정적, 급격히 변동, 점진적 소멸하는 세 가지 시나리오를 적용하였다. 제안된 적응형 도착 비용 MHE는 기존 고정 가중치 MHE와 H∞ 필터에 비해 평균 RMS 오차가 30 % 이상 감소했으며, 특히 교란이 급격히 변할 때도 안정적인 수렴을 보였다. 또한, 사전 가중치 행렬 Pₖ₋ₙ의 실시간 업데이트 연산량이 적어 실시간 제어 시스템에 적용 가능함을 확인하였다.
결론적으로, 이 논문은 적응형 도착 비용을 통한 MHE 설계가 강건 안정성을 이론적으로 보장하고, 실험적으로도 기존 방법을 능가한다는 점을 설득력 있게 제시한다. 사전 가중치의 사전 검증 가능성, 교란 이득의 N‑독립성, 그리고 i‑IOSS 기반의 일반적인 비선형 검출 가능 시스템에 대한 적용 범위 확대는 향후 실시간 상태 추정 및 제어 분야에 큰 영향을 미칠 것으로 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기