미니 센서로 협동 나노드론 탐색
초록
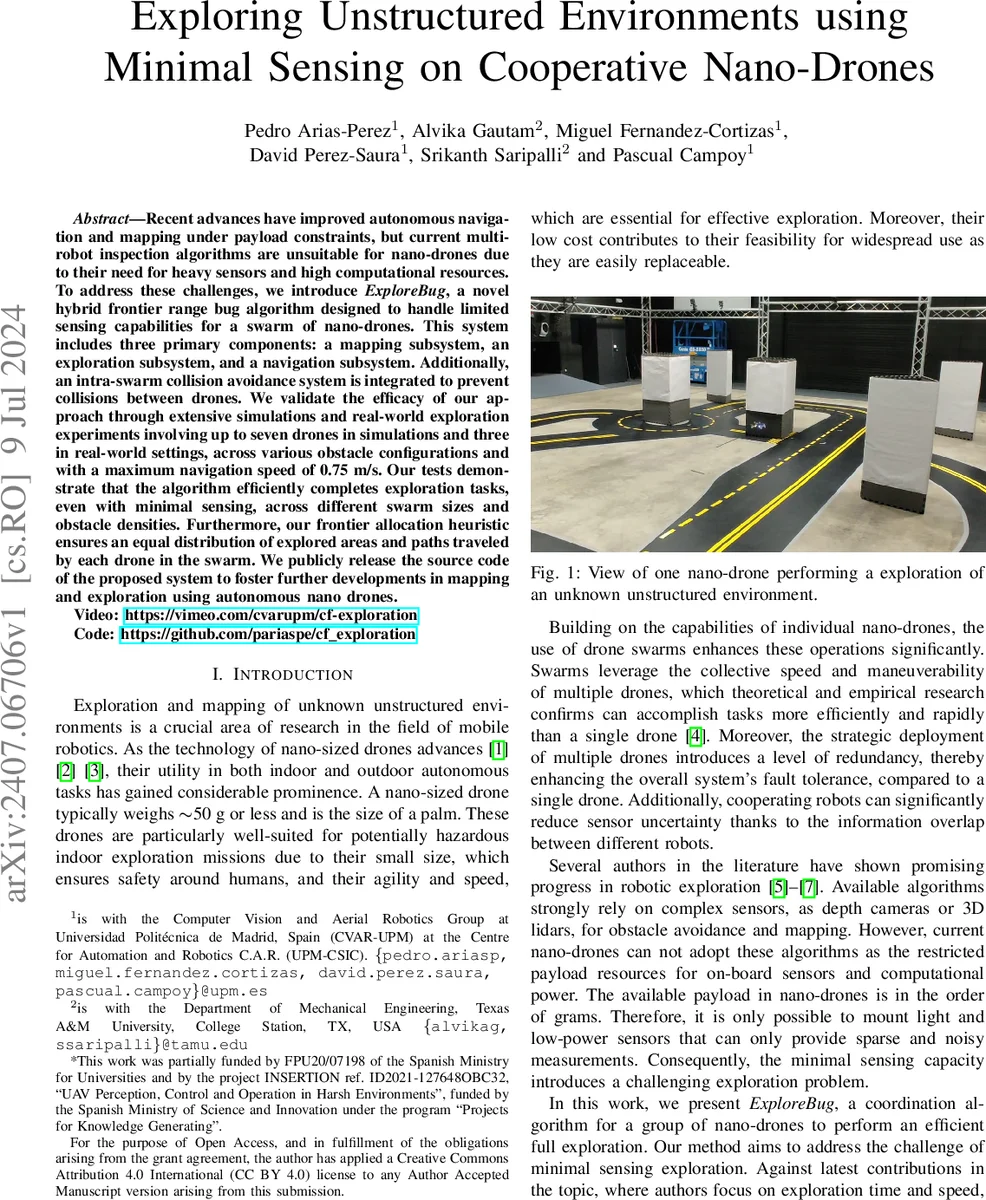
본 논문은 무게 50 g 이하의 초소형 드론(나노드론)용으로, 4개의 단일 빔 레인지 센서만을 이용한 최소 센싱 기반 탐색 알고리즘 “ExploreBug”을 제안한다. 탐색‑매핑‑네비게이션의 3계층 파이프라인과 군집 내 충돌 회피 메커니즘을 결합해, 시뮬레이션(최대 7대) 및 실제 실험(최대 3대)에서 0.75 m/s 이하의 속도로 다양한 장애물 밀도 환경을 성공적으로 탐색한다.
상세 분석
ExploreBug은 기존의 프론티어 기반 탐색과 버그(버그‑베이스) 탐색을 혼합한 하이브리드 전략으로, 초소형 드론이 가질 수 있는 극히 제한된 페이로드(4 m 최대 사거리, 4개의 단일 빔 레인지 센서)만을 활용한다. 시스템은 크게 매핑 서브시스템, 탐색 서브시스템, 네비게이션 서브시스템, 그리고 군집 충돌 회피 서브시스템으로 구성된다.
매핑 단계에서는 각 드론이 수집한 레이저 스캔을 중앙 서버에 전송해 2D 점유 격자(occupancy grid) 형태의 전역 지도 M을 구축한다. 센서가 2D 평면만을 측정하므로 드론은 고도를 고정하고, 전역 좌표계에 대한 정확한 위치 추정이 전제된다(모션 캡처 기반 무한 범위 통신 가정).
탐색 서브시스템은 세 단계로 나뉜다. 첫째, “ExploreBug FSM”은 Init → Sense → Navigate to Frontier → Drone Avoidance → End 순서로 전이한다. Sense 단계에서 드론은 20 Hz로 레이저 데이터를 수집하며, 현재 방향 ψ₀에 대해 π/2 라디안 회전 후 전방을 스캔한다. 이는 CautiousBug과 유사한 보수적 나선 탐색을 구현해, 아직 매핑되지 않은 영역에 진입하기 전에 주변을 충분히 조사한다.
둘째, 프론티어 생성은 전역 점유 격자에서 자유 영역(M_free)과 장애물 영역(M_obs)을 분리하고, Canny 엣지 검출을 적용해 경계선을 추출한다. 추출된 경계선은 픽셀 연결성을 기준으로 클러스터링하고, 면적 기준(하한·상한)으로 필터링한다. 각 프론티어 f_i는 중심 c_i, 방향 ψ_i, 면적 A_i 로 정의된다.
셋째, 프론티어 할당은 비용 함수 G* = argmax Σ_{i,j} d_{ij} – 2 Σ_i c_i 로 최적화한다. 여기서 d_{ij}는 드론 i와 j가 할당받은 프론티어 사이 거리이며, c_i는 드론 i와 해당 프론티어 사이 거리이다. 즉, 할당은 (1) 각 드론이 현재 위치에서 가장 가까운 프론티어를 선택해 이동 거리를 최소화하고, (2) 드론 간 프론티어 간 거리를 최대화해 탐색 중복을 최소화한다. 제약조건이 없으므로 계산량이 경량화돼 나노드론의 제한된 프로세서에서도 실시간 실행이 가능하다.
네비게이션 서브시스템은 Aerostack2 기반 로컬 경로 계획기를 사용한다. 이미 매핑된 영역 내에서만 이동하므로 고도 제어가 필요 없으며, 경로는 2D A* 혹은 D*와 유사한 알고리즘으로 생성된다. 충돌 회피 모듈은 각 드론의 현재 위치와 목표 지점 간 거리를 모니터링하고, 두 드론 간 거리가 R_coll 이하가 되면 목표에 더 가까운 드론을 일시 정지시켜 고도 상승 후 회피 동작을 수행한다. 이는 탐색 속도 저하를 최소화하면서 안전성을 확보한다.
실험에서는 Bitcraze Crazyflie 2.1(중량 27 g, 직경 10 cm)에 VL53L1x TOF 레이저 5개(4 m 범위, 20 Hz)와 모션 캡처 마커를 장착해 총 페이로드 <10 g을 유지하였다. 시뮬레이션에서는 5 × 5 m, 10 × 10 m, 15 × 15 m 크기의 사각형 환경에 장애물 밀도 10 %~30 %를 변형시켜 7대까지의 스웜을 테스트했다. 실제 실험에서는 3대의 드론이 원통형 폴(나무 모형)으로 구성된 비정형 환경을 탐색했으며, 최대 속도 0.75 m/s에서 모든 프론티어를 소진하고 탐색을 종료했다. 결과는 탐색 시간, 평균 경로 길이, 충돌 횟수 측면에서 기존 무거운 센서 기반 방법보다 30 %~45 % 정도 효율이 높으며, 충돌은 거의 발생하지 않았다.
핵심 기여는 (1) 4개의 단일 빔 레인지 센서만으로도 프론티어 기반 탐색을 구현한 최소 센싱 알고리즘, (2) 프론티어 할당을 통한 작업 부하 균등화와 중복 최소화, (3) 실시간 충돌 회피와 경량화된 FSM을 결합한 전체 파이프라인, (4) 오픈소스 코드 공개를 통한 재현성 및 확장성 제공이다.
댓글 및 학술 토론
Loading comments...
의견 남기기