형상에 구애받지 않는 메쉬프리 탄성 시뮬레이션, Simplicits
초록
본 논문은 3D 객체를 점유 함수 형태로 추상화하고, 각 객체마다 공간적으로 변하는 가중치를 학습하는 작은 암시적 신경망을 이용해 변형 기반을 구축한다. 이 기반을 통해 메쉬·그리드·데이터에 독립적인 탄성 시뮬레이션을 수행하며, Monte‑Carlo 샘플링으로 에너지 손실을 최소화한다. 실험은 SDF, 포인트 클라우드, 신경 프리미티브, CT 스캔, 라디언스 필드, 가우시안 스플랫, 표면·볼륨 메쉬 등 다양한 표현과 여러 재료 모델·접촉·시간 적분 방식을 검증한다.
상세 분석
이 연구는 “표현 독립성”이라는 핵심 목표를 달성하기 위해 모든 3D 형상을 점유 함수(occupancy function)라는 공통 인터페이스로 환원한다는 혁신적인 아이디어를 제시한다. 점유 함수는 공간의 임의의 점에 대해 해당 점이 물체 내부에 있는지를 0‑1 혹은 signed distance 형태로 반환하므로, 기존의 메쉬, 볼륨, 혹은 신경 기반 표현을 동일한 방식으로 다룰 수 있다. 논문은 각 객체마다 작은 MLP(다층 퍼셉트론)를 학습시켜, 위치에 따라 변하는 가중치 벡터를 출력하도록 설계한다. 이 가중치들은 물체의 변형을 저차원 선형 결합으로 표현하는 ‘변형 기반(basis)’ 역할을 하며, 전통적인 모드 해석이나 POD(Proper Orthogonal Decomposition)와 유사하지만, 사전 정의된 물리적 모드가 아니라 데이터‑주도적으로 학습된 물리적으로 의미 있는 변형을 포착한다는 점이 차별점이다.
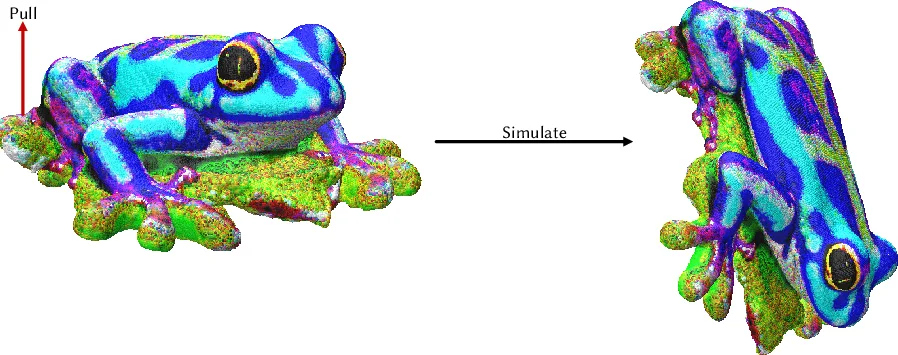
학습 단계에서는 무작위 변형(perturbation)을 가해 물체의 변형 에너지(탄성 에너지)를 Monte‑Carlo 방식으로 샘플링한다. 샘플링된 포인트들에 대해 점유 함수와 변형 기반을 이용해 변위와 변형 텐서를 계산하고, 이를 통해 에너지와 그라디언트를 추정한다. 손실 함수는 추정된 에너지와 실제 물리 법칙(예: 최소 에너지 원리) 사이의 차이를 최소화하도록 설계되었으며, 동시에 변형 기반이 정규화되고 과도하게 복잡해지는 것을 방지하기 위해 L2 정규화와 스파스성 제약을 포함한다. 이렇게 학습된 변형 기반은 런타임에 매우 저차원이며, 실시간 수준의 시뮬레이션이 가능하도록 만든다.
시뮬레이션 단계에서는 변형 기반의 가중치를 시간 적분 스킴(예: 암시적 뉴턴‑라프슨, 변분적 적분)으로 업데이트한다. 물체 내부의 모든 점에 대해 변위는 변형 기반과 가중치의 선형 결합으로 복원되며, 접촉이나 경계 조건은 점유 함수와 별도의 충돌 검출 모듈을 통해 처리한다. 이때, 메쉬가 없으므로 전통적인 충돌 메쉬 생성 비용이 사라지고, 점유 함수만으로도 충돌 판정이 가능해진다.
다양한 실험 결과는 이 프레임워크가 SDF, 포인트 클라우드, 신경 임시장, CT 스캔 등 거의 모든 형태의 입력 데이터를 동일한 파이프라인으로 처리할 수 있음을 보여준다. 특히, 복잡한 비선형 변형과 큰 변위 상황에서도 에너지 보존 및 수렴 특성이 기존 메쉬 기반 FEM과 비교해 경쟁력을 유지한다. 또한, 다양한 재료 모델(선형 탄성, Neo‑Hookean, St. Venant‑Kirchhoff 등)과 접촉 모델(프리시전, 프릭션)도 손쉽게 교체 가능하며, 시간 적분 스킴도 명시적으로 선택할 수 있다.
핵심 기여는 (1) 점유 함수를 통한 형상 통합 인터페이스, (2) 물체별 학습된 저차원 변형 기반, (3) Monte‑Carlo 기반 에너지 최소화 학습, (4) 메쉬·그리드·데이터에 종속되지 않는 실시간 탄성 시뮬레이션 파이프라인이다. 이 접근법은 디지털 트윈, 가상·증강 현실, 로봇 시뮬레이션 등 다양한 응용 분야에서 기존 메쉬 생성·전처리 비용을 크게 절감하고, 복합적인 데이터 소스가 혼재하는 환경에서도 일관된 물리 시뮬레이션을 제공한다는 점에서 큰 의미를 가진다.