VR 아일 아카데미: 저비용 디지털 트윈 기반 로봇 수술 훈련 시스템
초록
본 논문은 기존 수술 로봇 시스템의 고가와 물리적 제약을 극복하기 위해, 손·발 트래킹을 지원하는 휴대형 VR 디지털 트윈인 “VR 아일 아카데미”를 제안한다. Unity와 MAGES SDK를 활용해 다빈치 로봇을 모델링하고 12개의 기본 훈련 시나리오를 구현했으며, 실시간·오프라인 오류 평가 기능을 제공한다. 비전문가 테스트 그룹을 대상으로 한 실험 결과, 훈련 횟수가 증가할수록 오류 지표가 현저히 감소함을 확인함으로써 저비용 VR 환경에서도 로봇 조작 기술 습득이 가능함을 입증한다.
상세 분석
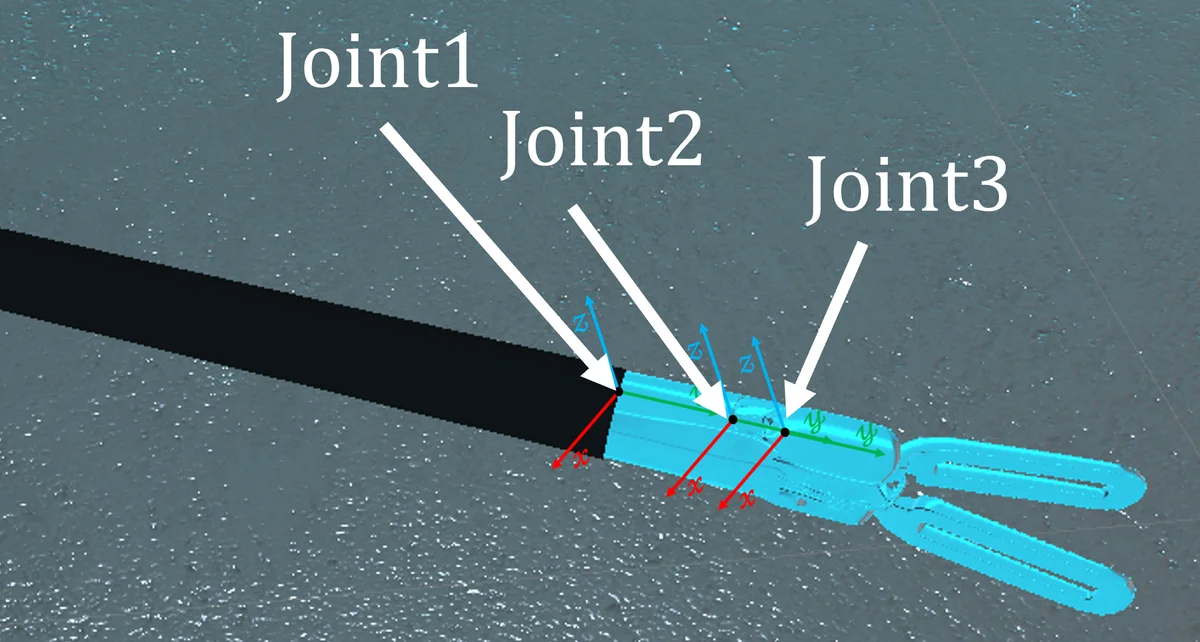
본 연구는 디지털 트윈 개념을 의료 교육에 적용한 사례로, 물리적 수술 로봇(특히 다빈치 시스템)의 마스터‑슬레이브 구조를 가상 환경에 정밀히 재현하였다. Unity 엔진을 기반으로 구현된 점은 개발 생산성 및 멀티플랫폼 지원 측면에서 큰 장점이며, MAGES SDK의 물리 기반 조직 절단·변형 알고리즘을 활용해 실제 조직과 유사한 소프트 바디 시뮬레이션을 제공한다. 손 트래킹은 일반적인 VR 컨트롤러(또는 핸드 트래킹 지원 HMD)로 구현했으며, 발 트래킹을 추가함으로써 페달 조작까지 가상화해 실제 다빈치 콘솔의 3가지 페달(카메라, 클러치, 30도 카메라 전환) 기능을 그대로 재현하였다. 이는 기존 VR 수술 시뮬레이터가 주로 손만을 이용해 제한된 인터랙션을 제공하던 것과 차별화된다.
시나리오 설계는 기본적인 로봇 팔 조작, 카메라 전환, 클러치 사용 등 12개의 훈련 과제로 구성되었으며, 각 과제는 단계별 지시와 성공/실패 조건을 명시한다. 특히 “Sea Spikes”와 같은 복합 과제는 손목 미세 조작과 페달 동시 사용을 요구해 실제 수술 환경에서의 멀티태스킹 능력을 평가한다. 실시간 오류 측정은 MAGES SDK의 이벤트 로깅을 활용해 사용자의 움직임, 힘 적용, 목표물 충돌 여부 등을 수치화하고, 오프라인 분석을 통해 학습 곡선을 시각화한다.
평가에서는 사전 훈련 경험이 없는 피험자 10명을 대상으로 5회 이상 반복 훈련을 진행했으며, 각 세션 후 평균 오류 거리와 시간, 성공률을 기록하였다. 결과는 훈련 회수 증가에 따라 오류 거리 평균이 35% 이상 감소하고, 과제 완료 시간이 28% 단축되는 등 통계적으로 유의미한 향상을 보였다. 이는 저비용 VR 환경에서도 반복 학습을 통한 운동 기억 형성이 가능함을 시사한다.
한편, 제한점으로는 현재 시뮬레이션이 시각적 피드백과 물리적 힘 피드백(햅틱) 사이에 격차가 존재한다는 점이다. 실제 로봇 팔의 저항감과 촉각 정보를 재현하지 못해 고급 수술 단계에서는 한계가 있을 수 있다. 또한, 평가 지표가 주로 기하학적 오류와 시간에 국한되어 있어, 임상적 판단력이나 상황 인식 같은 고차원적 스킬을 측정하기엔 부족하다. 향후 연구에서는 햅틱 디바이스와의 연동, AI 기반 자동 피드백 시스템 도입, 그리고 임상 전문가와의 협업을 통한 시나리오 고도화가 필요하다.
댓글 및 학술 토론
Loading comments...
의견 남기기