비관성 자세 추정기: 희소 관성 인간 동작 캡처의 비관성 효과 모델링
초록
본 논문은 인간 루트 프레임이 가속·회전할 때 이를 비관성 프레임으로 간주하고, 가상력(관성력)을 자동회귀 모델로 추정한다. 가상력을 보정함으로써 IMU 가속도 측정치를 뉴턴 법칙에 맞게 정정하고, 합성 데이터와 노이즈 모델링을 통해 신경망을 학습시켜 기존 관성 캡처의 정확도와 강인성을 크게 향상시킨다.
상세 분석
이 연구는 기존 관성 모션 캡처 시스템이 루트 프레임을 암묵적으로 관성 프레임으로 취급하는 한계를 지적한다. 실제 인간 움직임에서는 루트(골반·허리)가 급격히 가속하거나 회전할 때, 관성 좌표계가 아닌 비관성 좌표계가 된다. 이때 가속도 센서는 실제 물리적 가속도 외에 관성력(코리올리, 원심, 가속에 의한 가상력)을 포함하게 되며, 이를 무시하면 뉴턴의 제2법칙이 위배되어 포즈 추정에 큰 오차가 발생한다. 논문은 이러한 가상력을 자동회귀(AR) 모델로 표현한다. AR 모델은 물리학적 제약(예: 가속도와 각속도의 연속성, 질량·관성 텐서의 일정성)을 반영해 파라미터를 설계하고, 시간적 의존성을 통해 현재 프레임의 가상력을 과거 IMU 데이터와 루트 상태로부터 예측한다.
가상력 보정 후에는 IMU 가속도와 실제 몸체 가속도 사이의 관계가 결정론적이며, 이를 딥러닝 네트워크가 학습하기에 적합해진다. 저자들은 합성 데이터 파이프라인을 구축해 물리 기반 시뮬레이터(예: MuJoCo, Bullet)에서 인간 스켈레톤을 움직이며 가상 IMU 데이터를 생성한다. 여기서 센서 노이즈, 바이어스, 스케일 오류, 캘리브레이션 오차 등을 파라미터화해 실제 하드웨어 특성을 재현한다. 이렇게 만든 대규모 합성 데이터셋으로 신경망을 사전 학습(pre‑train)하고, 실제 캡처 데이터에 미세조정(fine‑tune)한다.
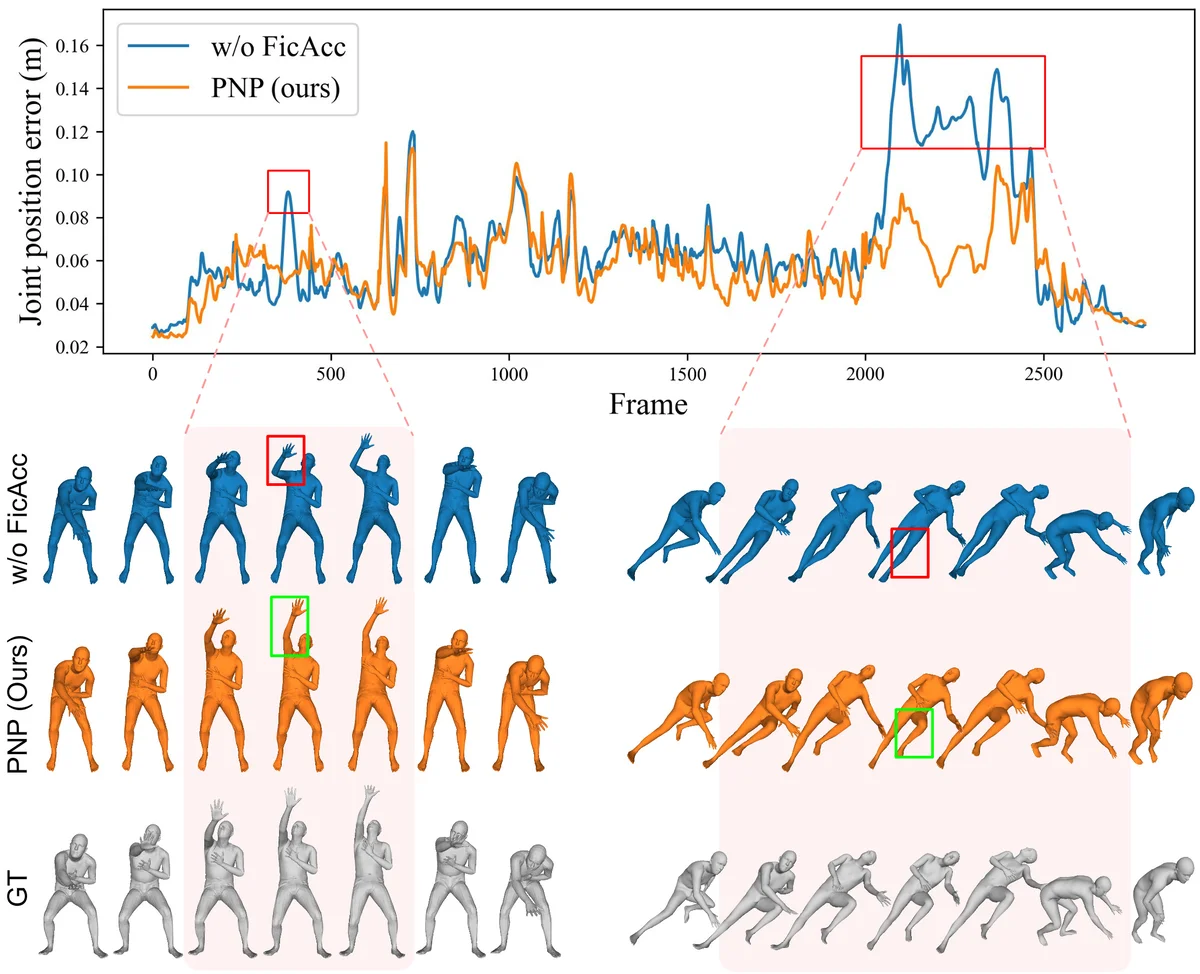
실험에서는 기존 루트‑관성 기반 방법과 비교해 평균 관절 각도 오차가 30% 이상 감소하고, 급격한 움직임(점프, 회전)에서의 오류가 현저히 낮아졌다. 또한 캘리브레이션 오류가 인위적으로 삽입된 경우에도 제안 방법은 강인하게 동작하며, 하드웨어별 노이즈 모델을 조정함으로써 다양한 IMU 센서에 적용 가능함을 보였다.
이 논문의 핵심 기여는 (1) 비관성 프레임에서 발생하는 가상력을 물리‑기반 AR 모델로 정량화, (2) 가상력 보정을 통해 IMU 가속도를 물리적으로 일관된 형태로 변환, (3) 합성 데이터와 노이즈 파라미터 튜닝을 통한 실용적인 학습 파이프라인 제공이다. 이러한 접근은 향후 저비용 IMU 기반 모션 캡처, 실시간 애니메이션, 재활 로봇 제어 등 다양한 분야에 파급 효과를 기대하게 만든다.