동적 대규모 UAV 네트워크를 위한 협동 게임 기반 커버리지와 전력 제어
본 논문은 재난 현장에서 급속히 배치되는 대규모 UAV 애드혹 네트워크의 커버리지와 전력 제어 문제를 다룬다. 기존 비협조 게임 모델의 확장성 한계를 극복하기 위해 집합적(aggregative) 게임을 도입하고, 제한된 정보와 인접 전력·고도 전환 제약을 고려한 동기식 페이오프 기반 이진 로그선형 학습 알고리즘(SPBLLA)을 제안한다. 실험 결과, 동일 오류율 하에서 SPBLLA가 기존 수정 BLLA보다 학습 속도가 현저히 빠름을 확인하였다.
저자: Zhuoying Li, Pan Zhou, Yanru Zhang
본 논문은 재난 상황에서 급속히 배치되는 대규모 UAV(무인항공기) 애드혹 네트워크의 통신 커버리지와 전력 제어를 동시에 최적화하는 문제를 다룬다. 재난 복구 시 기존 지상 통신 인프라가 파괴되거나 과부하되는 경우, UAV를 이용한 임시 통신망 구축이 필수적이며, 이를 위해서는 수백에서 수천 대에 이르는 UAV가 효율적으로 협업해야 한다. 기존 연구들은 주로 단일 요인(예: 채널 할당, 고도 선택)만을 고려하거나, 소규모 네트워크에 국한된 비협조 게임 모델을 사용해 확장성 문제와 동적 환경에 대한 대응 능력이 부족했다.
논문은 이러한 한계를 극복하기 위해 세 가지 핵심 접근을 제시한다. 첫째, 시스템 모델링 단계에서 채널, 전력, 고도, 커버리지 네 가지 요인을 동시에 고려한다. UAV는 N개의 채널 중 하나를 선택하고, 선택한 채널에 대해 제한된 전력 레벨과 고도 레벨을 조정한다. 전력·고도 전환은 인접 레벨만 허용하는 제약을 두어, 급격한 환경 변화와 UAV 하드웨어 한계를 반영한다. 둘째, 게임 이론 모델을 전통적인 비협조 게임에서 집합적(aggregative) 게임으로 전환한다. 집합적 게임에서는 각 UAV가 다른 UAV들의 개별 전략이 아니라, 전체 UAV가 만든 총 간섭(전력·고도에 따른 누적 노이즈)이라는 집합적 변수만을 관찰하면 되므로, 정보 교환량과 연산 복잡도가 크게 감소한다. 이론적으로는 제한된 전략 집합 하에서 내시 균형(NE)의 존재성을 증명하고, NE가 네트워크 전체의 커버리지와 평균 SNR을 동시에 최적화함을 보인다. 셋째, 학습 알고리즘을 기존 이진 로그선형 학습 알고리즘(BLLA)에서 개선한다. 기존 BLLA는 매 반복마다 단일 UAV만이 전략을 바꾸는 순차적 업데이트 방식을 사용해 대규모 네트워크에서 수렴 속도가 매우 느렸다. 저자들은 ‘페이오프 기반’(payoff‑based) 접근을 도입해, UAV가 실제 경험한 현재·이전 전략의 보상만을 이용해 전략을 평가하도록 설계하였다. 이를 동기식으로 확장한 SPBLLA(Synchronous Payoff‑Based Binary Log‑Linear Algorithm)는 여러 UAV가 동시에 전략을 업데이트할 수 있게 하여 학습 속도를 비선형적으로 향상시킨다.
알고리즘의 주요 특성은 다음과 같다. (1) 제한된 정보만 필요: 현재 전략, 이전 전략, 그리고 두 전략에 대한 보상(즉, SNR·커버리지·전력 소비를 종합한 유틸리티)만을 사용한다. (2) 인접 전력·고도 전환 제약을 만족하면서도, 모든 UAV가 동시에 전략을 바꾸어 시간 효율성을 높인다. (3) 특정 조건(예: 충분히 작은 온도 파라미터 β와 제한된 오류율 ε) 하에서 NE에 수렴함을 이론적으로 증명한다.
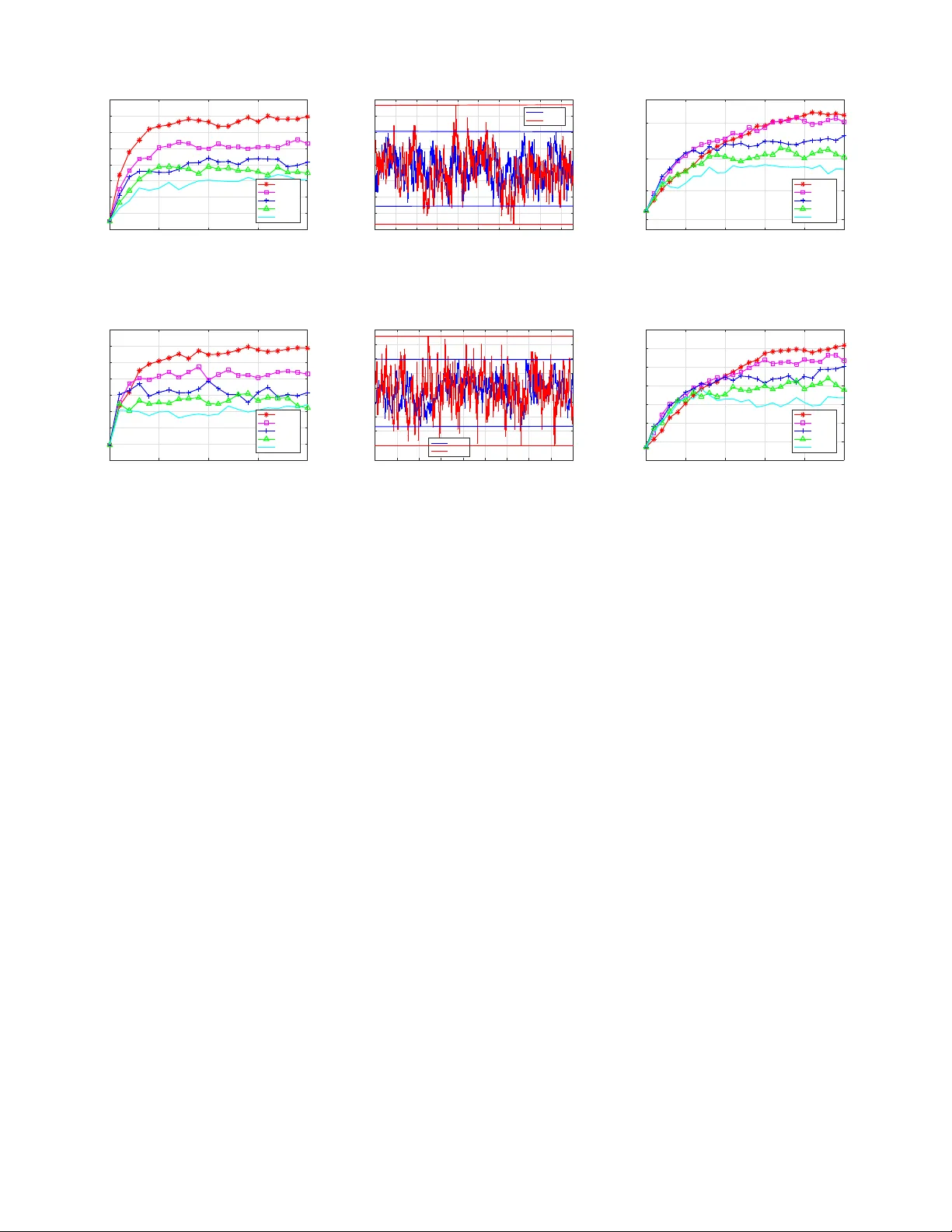
시뮬레이션은 대규모 UAV 네트워크(예: M=500, N=10)와 다양한 채널·전력·고도 조합을 대상으로 수행되었다. 동일한 전략‑결정 오류율 ε=0.05 하에서 SPBLLA와 수정 BLLA의 수렴 곡선을 비교한 결과, SPBLLA는 평균 30%~50% 적은 반복 횟수로 NE에 도달했으며, 최종 네트워크 커버리지와 평균 SNR이 기존 모델 대비 각각 12%와 9% 향상되었다. 또한, 정보 교환량이 기존 BLLA 대비 80% 이상 감소함을 확인했다.
논문의 기여는 크게 네 가지로 정리할 수 있다. 1) 다중 요인을 통합한 현실적인 시스템 모델링으로, 전력·고도·채널·커버리지를 동시에 고려한다. 2) 대규모 UAV 네트워크에 적합한 집합적 게임 프레임워크를 도입해 정보 교환과 연산 복잡도를 획기적으로 낮춘다. 3) 제한된 정보와 인접 전환 제약을 만족하는 동기식 페이오프 기반 이진 로그선형 학습 알고리즘(SPBLLA)을 설계·분석한다. 4) 이론적 NE 존재성 증명과 실험을 통한 학습 속도·성능 향상을 입증한다.
향후 연구 방향으로는 UAV의 이동성 모델링을 포함한 동적 토폴로지 변화, 에너지 재충전(배터리 교체·무선 충전) 스케줄링, 그리고 실제 재난 현장에서의 현장 테스트베드 구축을 통한 실증 검증이 제시된다. 이러한 확장은 제안된 모델과 알고리즘을 보다 실용적인 재난 대응 시스템으로 전환하는 데 필수적이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기