다중 로봇 협동을 위한 유체 흐름 기반 내비게이션 모델 및 실험 검증
** 본 논문은 이상 유체 흐름을 수학적 모델로 삼아, 협동 에이전트는 스트림라인을 따라 이동하고 비협동(고장) 에이전트를 안전하게 둘러싸는 새로운 다중 로봇 내비게이션 방식을 제안한다. 잠재·스트림 함수의 라플라스 방정식 해를 이용해 경로를 설계하고, 이를 Crazyflie 쿼드콥터 실험을 통해 다섯 가지 장애·고장 시나리오(SNCF, TVNC, TVC, SOLE)에서 검증한다. **
저자: Harshvardhan Uppaluru, Mohammad Ghuran, Hossein Rastgoftar
**
본 논문은 다중 로봇 시스템(MAS)의 신뢰성을 강화하기 위해 ‘이상 유체 흐름’ 모델을 기반으로 한 새로운 내비게이션 프레임워크를 제안한다. 서론에서는 자연계에서 물체가 유체 흐름을 따라 움직이는 현상을 로봇 협동에 적용하고자 하는 동기를 제시한다. 기존 연구로는 충돌 원뿔, 인공 퍼텐셜 필드(APF), 속도 장애물(Velocity Obstacle), 플러킹, 샘플링 기반 방법, 그리고 해양 로봇을 위한 흐름 기반 제어 등이 소개되지만, 이들 방법은 지역 최소점에 빠지거나 동적 장애물에 대한 대응이 제한적이다.
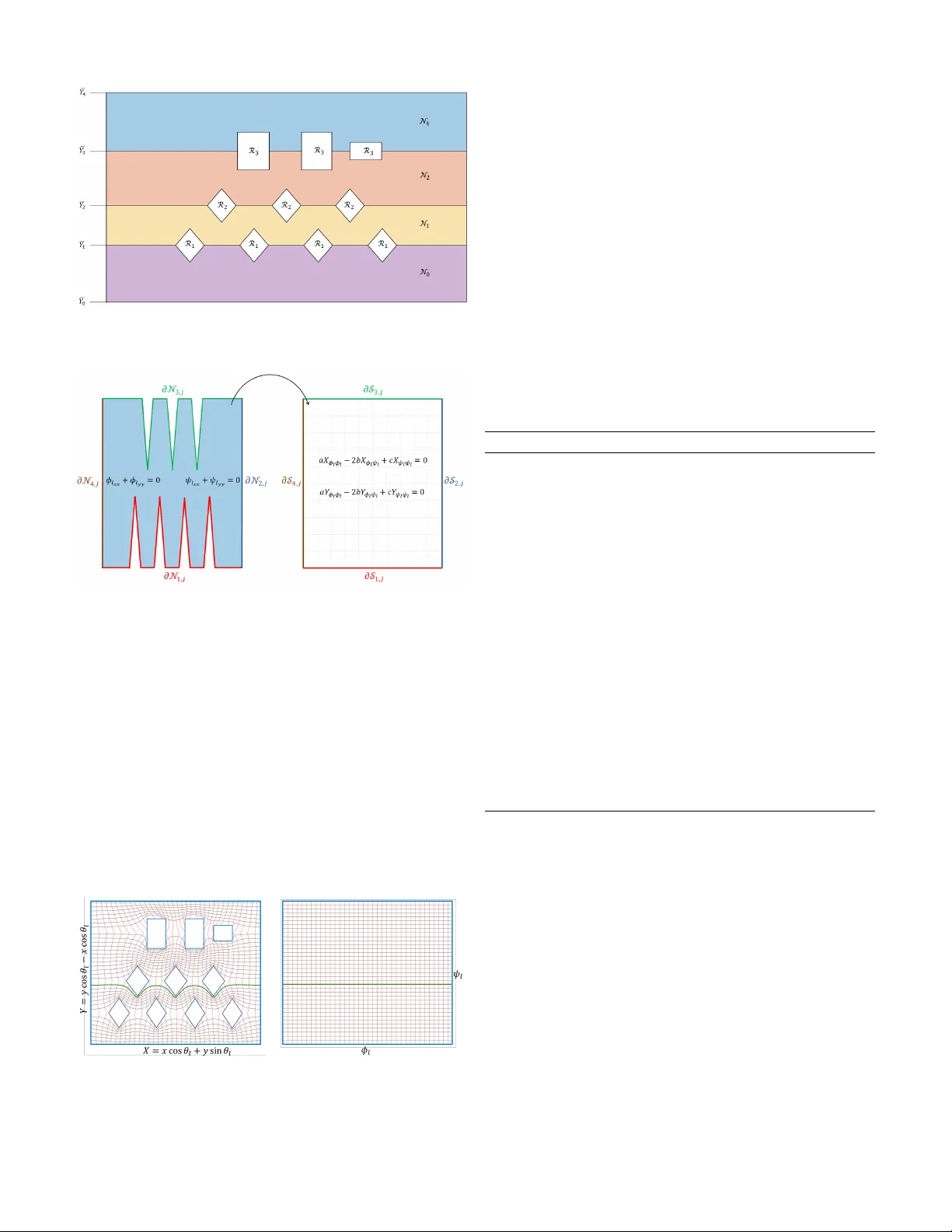
본 연구의 핵심 기여는 네 가지로 요약된다. 첫째, 다중 에이전트가 공유 모션 공간에서 협동(비특이)과 비협동(특이) 에이전트로 구분되어, 협동 에이전트는 스트림라인을 따라 이동하면서 비협동 에이전트를 안전하게 둘러싸는 ‘유체 흐름 내비게이션’ 모델을 제시한다. 둘째, 충돌 회피를 위해 각 장애물을 스트림라인이 감싸는 ‘강체’로 모델링하고, 에이전트의 목표 궤적을 해당 스트림라인에 매핑함으로써 전역적인 충돌 회피를 보장한다. 셋째, 다중 팀이 동시에 동일한 공유 공간에서 협업하도록 설계된 알고리즘을 제시하고, 정적·동적 장애물, 그리고 여러 종류의 고장 상황(Stationary Non‑Concurrent Failures, Time‑Varying Non‑Cooperative, Time‑Varying Cooperative, Stationary Obstacle‑Laden Environment) 등을 포괄하는 다섯 가지 시나리오를 정의한다. 넷째, CFD에서 사용되는 메쉬 생성 기법을 차용해 복잡한 장애물 배치를 ‘플래닝 스페이스’(φ, ψ)로 변환하고, 이를 통해 장애물‑없는 계획 공간에서 경로를 설계한 뒤 역변환으로 실제 좌표를 얻는 방법을 제시한다. 이는 기존 경로 계획 기법이 직면한 ‘복잡한 지오메트리 처리’ 문제를 효과적으로 해결한다.
수학적 모델링은 다음과 같다. 에이전트 집합 V를 m개의 클러스터 M으로 나누고, 각 클러스터 l에 대해 잠재 함수 φ_l(x,y,θ_l,t)와 스트림 함수 ψ_l(x,y,θ_l,t)를 정의한다. 두 함수는 라플라스 방정식 ∇²φ_l=0, ∇²ψ_l=0을 만족한다. 에이전트 i∈V_l는 ψ_l=const 라는 레벨 곡선을 따라 이동하며, 그 접선 벡터는 T_i =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기