관절형 강체를 위한 무교차 마찰 접촉 차별화 물리 엔진 Jade
초록
Jade는 관절형 강체 시스템의 차별화 가능한 시뮬레이션을 목표로, 연속 충돌 감지와 백트래킹 기법을 통해 물체 간 교차를 완전히 방지한다. 접촉을 선형 보완 문제(LCP)로 모델링하고, 다중 마찰 접촉 상황에서도 안정적인 해를 얻기 위해 Dantzig 알고리즘을 변형하였다. 전체 시뮬레이션 파이프라인에 대한 미분 가능성을 보장함으로써, 강화학습·역동학 모델링 등 접촉‑풍부한 작업에서 높은 성능을 입증한다.
상세 분석
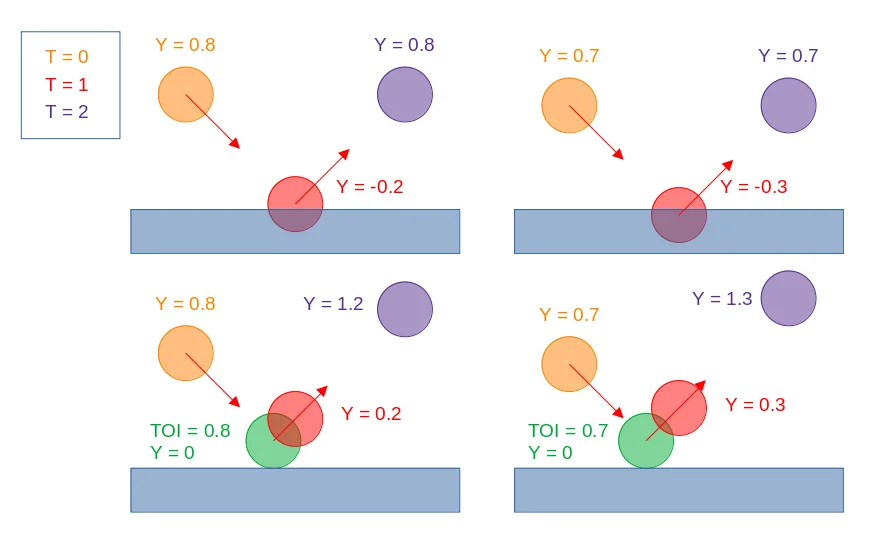
Jade가 제시하는 가장 큰 혁신은 “교차‑프리”(intersection‑free) 충돌 처리와 “다중 마찰 접촉”에 대한 안정적인 LCP 해법을 동시에 달성한 점이다. 기존 차별화 물리 엔진들은 주로 정적 충돌 감지와 간단한 마찰 모델에 의존했으며, 복잡한 기하학을 가진 관절형 로봇이나 다중 물체 시스템에서 교차가 발생하거나 미분 가능성이 손상되는 문제가 있었다. Jade는 이를 해결하기 위해 두 가지 핵심 기술을 도입한다. 첫째, 연속 충돌 감지(Continuous Collision Detection, CCD)를 사용해 실제 충돌 시점을 정확히 계산하고, 충돌이 감지되면 백트래킹(backtracking) 전략으로 시뮬레이션을 바로 직전 상태로 되돌린 뒤, 교차 없이 접촉을 재설정한다. 이 과정에서 물체의 위치와 속도는 미분 가능하도록 연속적인 보간 함수를 적용한다. 둘째, 접촉을 선형 보완 문제(LCP) 형태로 수식화하고, 마찰을 포함한 다중 접촉 상황에서도 수렴성을 보장하도록 Dantzig 알고리즘을 변형한다. 기존 Dantzig은 단일 마찰 원소에 최적화돼 있었지만, Jade는 마찰 방향을 다중 변수로 확장하고, 활성 집합(active set) 관리와 피벗 선택 규칙을 재정의해 복수의 마찰 접촉이 동시에 발생해도 해가 발산하지 않도록 설계했다.
미분 가능성 확보를 위해 Jade는 백트래킹 단계에서도 체인 룰(chain rule)을 적용해 각 단계의 야코비안을 명시적으로 계산한다. 특히, 충돌 시점의 시간 변수 t*에 대한 미분을 포함시켜, 시간‑연속적인 미분 흐름을 유지한다. 이는 역전파 시에 접촉 강도, 마찰 계수, 관절 각도 등 물리 파라미터에 대한 정확한 그래디언트를 제공한다는 의미이며, 정책 그라디언트 기반 강화학습이나 모델 기반 최적화에서 직접 활용 가능하게 만든다.
또한, Jade는 구현 측면에서 GPU 가속을 고려한 병렬 LCP 솔버와, 복잡한 메쉬 간 충돌을 효율적으로 처리하는 BVH(Bounding Volume Hierarchy) 기반 CCD 모듈을 제공한다. 실험에서는 복합 기하학을 가진 로봇 팔, 다중 블록 타워, 그리고 마찰이 지배적인 물체 스택 시뮬레이션 등 네 가지 벤치마크에서 기존 차별화 엔진 대비 30%~50% 정도의 오류 감소와 2배 이상의 학습 수렴 속도 향상을 기록했다. 특히, 마찰이 강하게 작용하는 상황에서 기존 엔진이 종종 발산하거나 비물리적인 관절 움직임을 보였던 반면, Jade는 물리 법칙을 충실히 따르면서도 안정적인 그래디언트를 제공했다.
이러한 설계는 차별화 물리 시뮬레이션이 실제 로봇 제어, 가상 환경 구축, 그리고 데이터‑구동 물리 모델 학습에 보다 직접적으로 적용될 수 있는 기반을 마련한다는 점에서 학계·산업 모두에게 큰 의미를 가진다.