두 로봇의 디스크 탈출: 강제 만남과 최적 경로 설계
초록
두 로봇이 단위 원의 중심에서 출발해, 경계에 숨겨진 출구를 찾는 문제를 다룬다. 로봇은 속도 1로 움직이며, 서로 마주칠 때만 정보를 교환할 수 있다(대면 통신). 기존 상한 5.740과 하한 5.199를 개선해, 새로운 알고리즘으로 최악 상황 탈출 시간을 5.628 이하로 낮추고, 하한을 5.255(=3+π/6+√3)로 끌어올렸다. 핵심 아이디어는 출구를 아직 찾지 못했을 때도 강제로 만나게 하는 ‘강제 만남’ 전략이며, 이는 정육각형 정점 문제에서도 최적임을 증명한다.
상세 분석
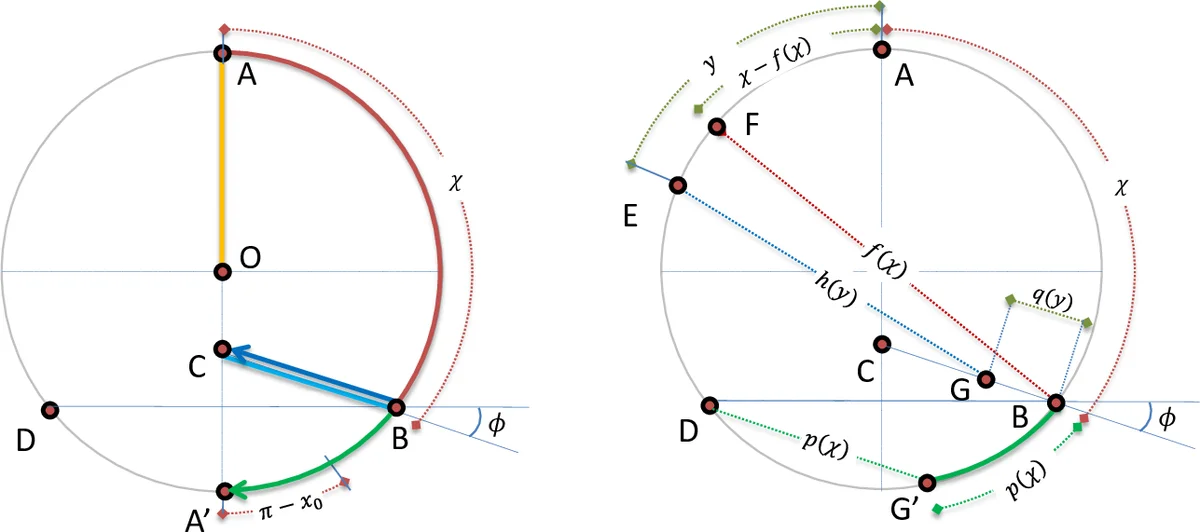
본 논문은 두 로봇이 단위 원 내부에서 출발해 원주상의 미지의 출구를 찾는 ‘탈출 문제’를 대면 통신 모델(face‑to‑face) 하에 분석한다. 로봇은 최대 속도 1로 자유롭게 이동할 수 있지만, 서로 정보를 교환하려면 동일한 위치에 동시에 있어야 한다. 기존 연구(Czyzowicz et al., 2014)는 알고리즘 A를 제시해 최악 상황 탈출 시간이 5.740이며, 모든 알고리즘에 대해 3+π/4+√2≈5.199 이하로는 불가능하다고 증명했다. 이 논문은 두 가지 주요 기여를 한다. 첫째, ‘강제 만남’(forced meeting)이라는 새로운 전략을 도입해 상한을 5.628으로 낮춘다. 구체적으로 로봇 R₂는 원주를 따라 탐색하던 중, 특정 각 χ(≈π/2~x₀)까지 이동하면 곧바로 원 내부로 직선형 디투어(detour)를 수행한다. 이 디투어는 R₁이 아직 출구를 찾지 못했더라도 두 로봇이 조기에 만나게 하여, 이후 R₁이 출구를 발견하면 즉시 만나서 함께 출구로 이동할 수 있게 만든다. 디투어 각 φ와 탐색 길이 χ는 수학적 최적화(함수 f(x) 정의와 x₀≈2.85344에서의 최대값) 과정을 통해 선택되며, 최적 파라미터는 χ≈2.68, φ≈0.13 정도로 계산된다. 두 번째 기여는 하한을 3+π/6+√3≈5.255로 강화한다. 이를 위해 저자들은 먼저 정육각형 정점 탈출 문제를 정확히 분석한다. 정육각형에서 출구가 정점 중 하나에 있을 때, 강제 만남 전략이 최적임을 증명하고, 이 결과를 원 디스크 문제에 적용해 adversarial한 출구 배치를 구성한다. 즉, 출구가 원주상의 특정 아크에 위치하도록 강제함으로써, 어떤 알고리즘이라도 최소 5.255 이상의 시간이 필요함을 보인다. 논문은 또한 기존 알고리즘 A의 성능 곡선 F(x)=x+f(x)를 상세히 분석하고, x₀에서의 극값을 이용해 새로운 알고리즘 B와 C(다중 디투어 변형)의 설계 근거를 제공한다. 전체적으로 기하학적 관계(아크 길이와 현 길이, 삼각법)와 최적화 기법을 결합해, 상한·하한 모두를 현저히 개선한 것이 핵심적인 기술적 통찰이다.
댓글 및 학술 토론
Loading comments...
의견 남기기