뇌수술용 고감도 촉각 공명 센서
초록
본 논문은 피에조 전기 빔모프를 이용한 촉각 공명 센서를 개선하여, 기계적 특성이 유사한 연부 조직을 구분할 수 있음을 보였다. 무작위 위상 멀티신스를 구동 신호로 사용하고 비모수 FRF 분석을 통해 접촉 특성을 평가한다. 비선형 기여를 분석한 결과, 실험 조건에서는 선형 모델이 충분히 타당함을 확인하였다. 젤라틴 팬텀을 이용한 실험에서 미세한 점탄성 차이를 식별했으며, 분산 분석을 통해 측정 신뢰도와 팬텀 제작 과정의 변동원을 규명하였다.
상세 분석
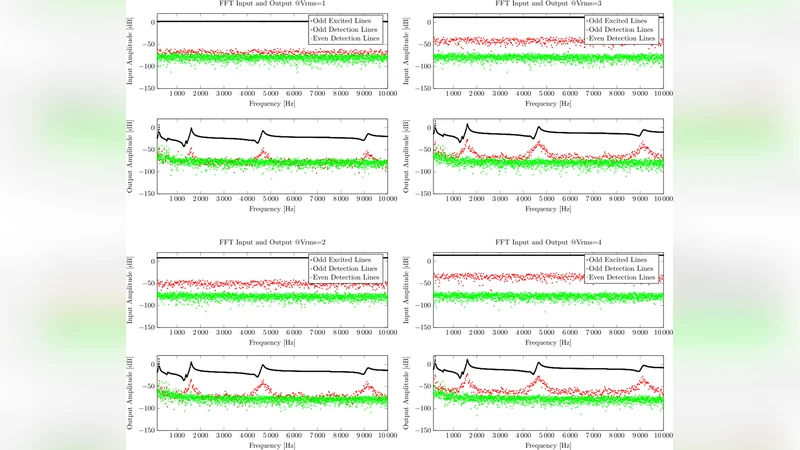
이 연구는 로봇 보조 수술에서 조직 구분 능력을 향상시키기 위한 센서 설계와 신호 처리 방법을 종합적으로 제시한다. 핵심은 피에조 전기 빔모프를 센서 팁에 결합하고, 무작위 위상(multisine) 신호를 이용해 넓은 주파수 대역에서 동시에 다중 진동을 유도함으로써 전통적인 단일 주파수 스윕 방식보다 측정 시간을 크게 단축시킨다. 비모수 주파수 응답 함수(FRF)를 추정함으로써 접촉 강성, 감쇠 및 질량 효과를 직접적으로 파라미터화한다. 비선형성 검증을 위해 고차 조화 성분과 상관관계 분석을 수행했으며, 실험 조건(접촉 압력 0.2–0.5 N, 진동 진폭 < 1 µm)에서는 비선형 왜곡이 노이즈 수준 이하임을 확인했다. 따라서 선형 2차 시스템 모델을 적용해도 충분히 정확한 조직 특성 추정이 가능함을 입증한다. 실험에서는 서로 다른 농도의 젤라틴(5 %, 7 %, 9 % w/v) 팬텀을 제작하고, 각 샘플에 대해 5 kHz까지의 FRF를 10 Hz 간격으로 측정했다. 결과는 저장 탄성(modulus)과 손실 탄성(loss modulus) 차이가 0.02 kPa 수준에서도 구별 가능함을 보여준다. 또한 분산 분석(ANOVA)을 통해 동일 농도 내에서도 제조 과정(혼합 속도, 냉각 시간)의 미세 차이가 측정 변동에 미치는 영향을 정량화했다. 이와 같이 센서 하드웨어와 고급 신호 처리, 통계적 검증을 결합한 접근법은 로봇 수술 시스템에 실시간 조직 감지를 통합하는 데 필요한 기술적 기반을 제공한다. 향후 연구에서는 실제 뇌 조직 샘플 및 동물 모델을 대상으로 검증하고, 센서 배열 및 머신러닝 기반 분류 알고리즘을 도입해 다중 차원 조직 특성 매핑을 목표로 할 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기