행동 트리와 신경망 제어기의 안전·수렴 통합 설계
초록
본 논문은 안전성과 목표 수렴을 보장하는 행동 트리(BT)에, 효율적이지만 보장이 약한 신경망 기반 데이터‑드리븐 컨트롤러를 모듈식으로 삽입하는 방법을 제시한다. BT를 연속‑시간 불연속 동역학 시스템으로 모델링하고, 운영 영역과 메타데이터 영역을 명시적으로 정의함으로써, 안전 컨트롤러와 모델 기반 컨트롤러가 기존 보장을 유지하면서 데이터‑드리븐 서브트리를 교체·전환하도록 설계한다. 이론적 결과를 역진자(인버티드 펜듈럼) 스윙업 예제로 검증한다.
상세 분석
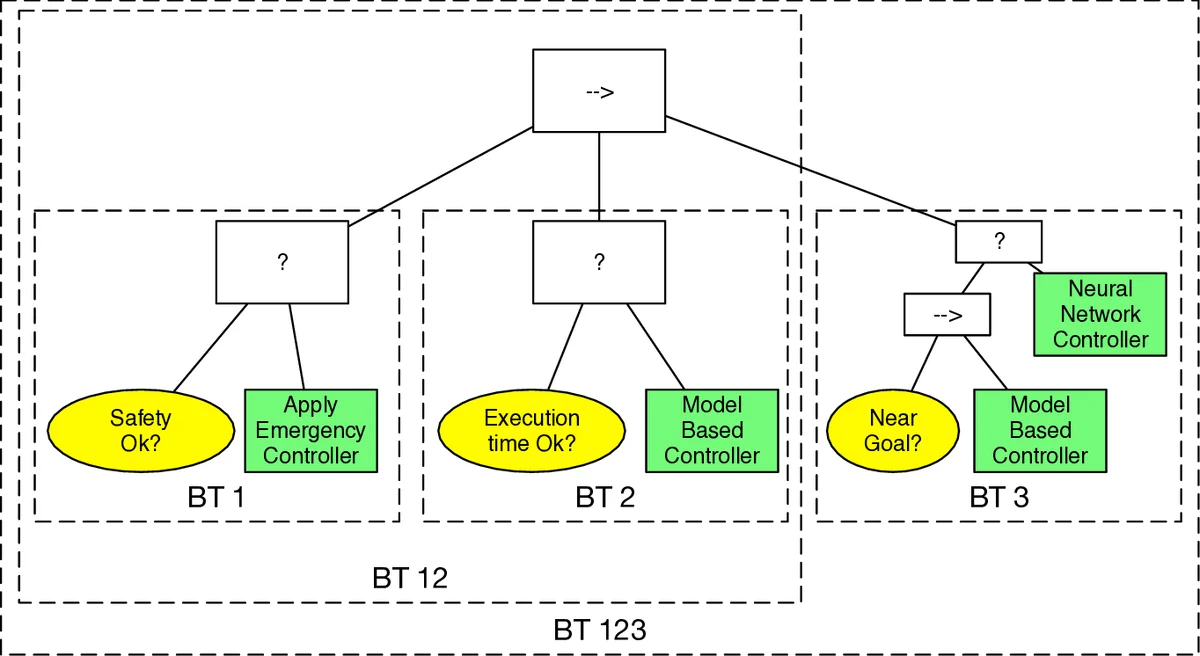
이 논문은 행동 트리(BT)의 모듈성에 기반해, 기존에 안전·수렴 보장을 갖는 모델 기반 컨트롤러와, 학습 기반 신경망 컨트롤러를 동시에 활용할 수 있는 구조적 프레임워크를 제시한다. 먼저 BT를 연속시간 시스템 ( \dot x = f(x,u_i(x)) ) 의 불연속 동역학 시스템(DDS)으로 정의하고, 각 노드 (T_i) 에 대해 메타데이터 함수 (r_i) 를 통해 성공(S), 실행(R), 실패(F) 영역을 구분한다. 운영 영역 ( \Omega_i ) 은 이러한 메타데이터 영역의 교집합·차집합으로 구성되며, 루트 BT가 어느 서브트리를 실행할지를 결정한다.
핵심은 안전 컨트롤러 (u_S) 와 모델 기반 컨트롤러 (u_{MB}) 가 각각 “Safeguarding”과 “Finite‑time Success(FTS)” 특성을 만족하도록 설계된다는 점이다. 논문은 지수 안정성을 이용해 (u_S) 와 (u_{MB}) 가 각각 안전 영역 (O) 을 피하고 목표 영역 (G) 에 유한 시간 내 도달함을 보인다. 데이터‑드리븐 컨트롤러 (u_{DD}) 는 비용이 낮지만 보장이 약하므로, BT는 두 단계의 검증을 둔다. 첫 번째는 안전 메타데이터 (r_S) 가 실패 영역 (F_1=O) 에 도달했을 때 즉시 (u_S) 를 호출하고, 두 번째는 실행 비용이 사전에 정의한 고비용 영역 (C) 을 초과하면 모델 기반 컨트롤러 (u_{MB}) 로 전환한다.
수학적으로는 Lemma 1을 통해 각 리프 노드의 운영 영역을 명시하고, Lemma 2에서 지수 안정성이 FTS와 안전성을 동시에 보장함을 증명한다. 이러한 조건이 충족될 경우, 데이터‑드리븐 서브트리가 실행 중이더라도 전체 BT는 언제든지 안전 영역을 침범하거나 목표 수렴을 포기하지 않는다.
마지막으로 논문은 역진자 스윙업 문제에 이 프레임워크를 적용한다. 안전 컨트롤러는 펜듈럼이 큰 각도에서 떨어지는 것을 방지하고, 모델 기반 LQR 컨트롤러는 목표 수평 위치에 도달하도록 설계된다. 데이터‑드리븐 신경망은 빠른 스윙업을 시도하지만, 비용 감시와 안전 감시가 동시에 작동해 보장된 성능을 유지한다. 전체적으로 이 접근법은 학습 기반 제어기의 효율성을 활용하면서도, 안전·목표 보장을 포기하지 않는 로봇 시스템 설계에 중요한 길을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기