물리 기반 사이버 물리 시스템 공격 탐지 모델 예측 제어 공동 설계
초록
본 논문은 비선형 사이버‑물리 시스템에 대한 거짓 데이터 주입(FDI) 공격을 탐지하기 위해 모델 예측 제어(MPC)와 잔차 기반 CUSUM 탐지기를 공동 설계하는 새로운 방법을 제시한다. MPC에 미래 출력이 사전 설계된 기준 궤적의 시간 불변 이웃집합 안에 머물도록 제약을 추가하고, 실시간 출력과 기준 궤적의 차이를 잔차로 사용해 비모수 CUSUM 검정으로 공격을 판별한다. 제안 기법은 비선형 연동 탱크 레벨 제어 예제로 검증하였다.
상세 분석
이 연구는 사이버‑물리 시스템(CPS) 보안에서 물리 기반 탐지의 가능성을 강조하면서, 기존에 제어 설계와 공격 탐지를 별도로 수행하던 패러다임을 탈피한다. 핵심 아이디어는 모델 예측 제어(MPC)의 최적화 문제에 ‘미래 출력이 기준 궤적의 고정 이웃집합(E) 안에 머물라’는 추가 제약을 삽입하는 것이다. 여기서 기준 궤적은 현재 시점 k에서 MPC가 산출한 최적 예측 출력 y*_{k+N|k}를 이용해 단계별로 갱신된다. 따라서 제어 입력 u_k는 기존 MPC와 동일하게 첫 번째 최적 입력을 적용하고, 동시에 실제 출력 y_k와 기준 궤적 ˜y_k 사이의 차이 r_k = ‖y_k‑˜y_k‖를 잔차로 정의한다.
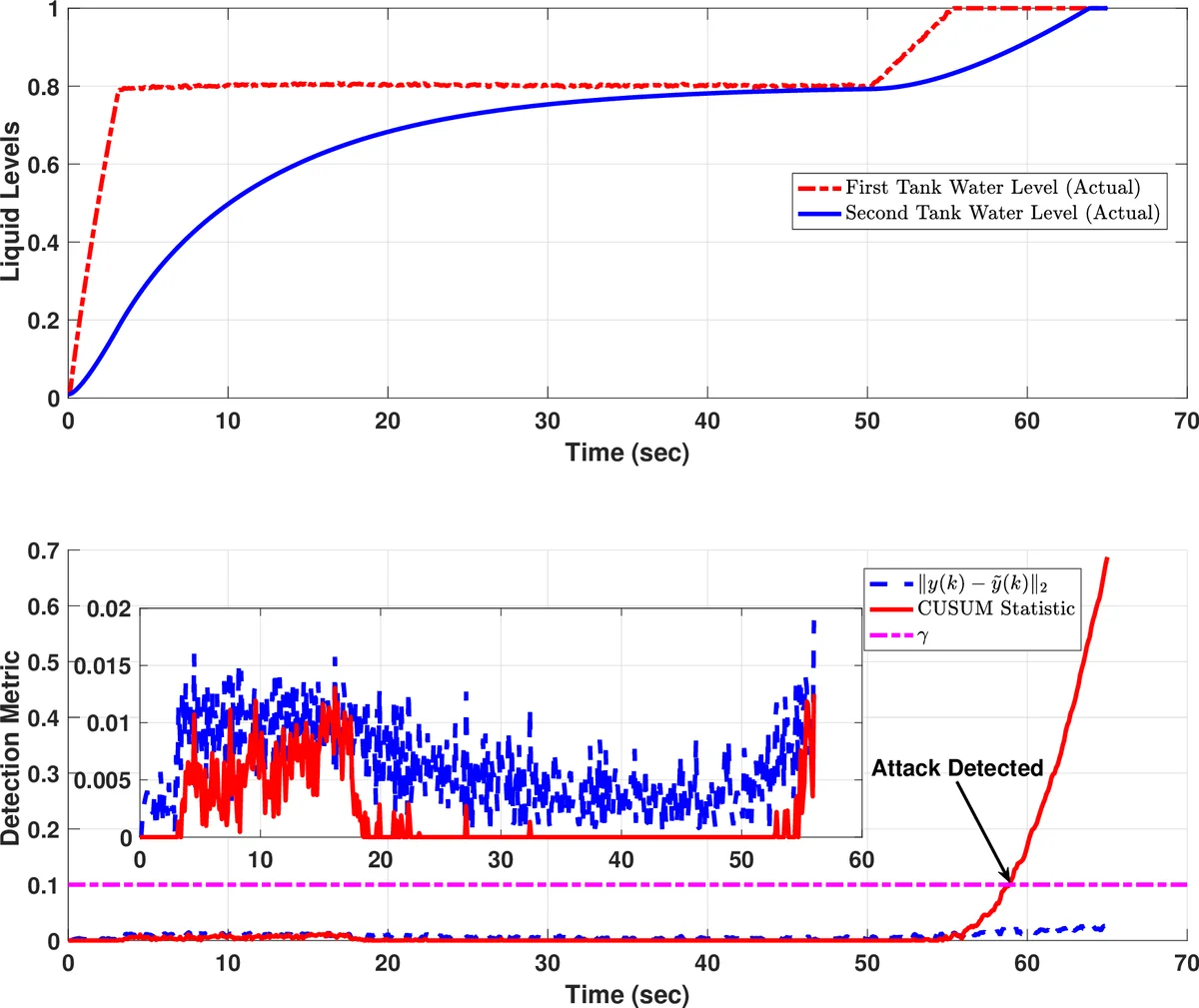
잔차는 비모수 누적합(CUSUM) 검정에 투입된다. CUSUM 통계 S_{k+1}=max(0, S_k + r_k – δ)는 정상 상태에서는 평균이 0에 가깝게 유지되도록 δ를 조정하고, 통계가 사전 설정된 임계값 γ를 초과하면 공격을 선언한다. 이 방식은 통계적 누적 효과를 활용해 순간적인 노이즈에 민감하지 않으며, 연속적인 작은 변형도 탐지할 수 있다.
공격 모델은 FDI 공격으로, 공격자는 입력 u_a,k 또는 출력 y_a,k 중 하나만을 동시에 조작할 수 있다는 가정(Assumption 1)을 둔다. 이는 두 채널을 동시에 장악하면 시스템 모델을 이용해 은밀히 위장할 수 있다는 점을 고려한 현실적인 제한이다.
제안된 공동 설계는 두 가지 트레이드오프를 내포한다. 첫째, 이웃집합 E의 크기가 작을수록 제어 성능은 저하되지만 탐지 민감도는 높아진다. 둘째, γ와 δ의 선택은 거짓 양성률과 탐지 지연 사이의 균형을 결정한다. 논문은 이러한 파라미터들을 시뮬레이션을 통해 경험적으로 튜닝한다.
비선형 시스템에 대한 적용 가능성을 강조하기 위해, 저자는 두 개의 연동 탱크 레벨 제어 문제를 선택하였다. 연속식 질량 보존 및 베르누이 방정식으로부터 도출된 비선형 동역학을 1차 전진 오일러 방식으로 이산화하고, 상태 전부를 피드백으로 가정한다. 시뮬레이션 결과는 정상 상황에서 MPC가 목표 레벨을 안정적으로 유지하면서, 공격이 발생하면 CUSUM 통계가 빠르게 임계값을 초과함을 보여준다.
이 연구는 비선형 CPS에 대한 물리 기반 탐지 기법을 MPC와 결합함으로써, 제어 성능을 크게 희생하지 않으면서도 실시간 공격 탐지를 구현할 수 있음을 증명한다. 또한, 공격자 제한(동시 채널 접근 불가)과 이웃집합 설계라는 두 가지 설계 자유도를 제공해 실용적인 보안 설계에 기여한다.
댓글 및 학술 토론
Loading comments...
의견 남기기