자동차 충돌 확률을 위한 새로운 접근법: 충돌 확률률률 기반 분석
초록
본 논문은 차량 간 충돌을 확률적으로 평가하기 위해 “충돌 확률률률”(collision probability rate) 개념을 도입한다. 다차원 확률 과정의 레벨 크로싱 이론을 활용해 충돌 확률률률의 상한을 일반적인 예측 모델(프로세스 노이즈 포함)에 대해 유도하고, 이를 근사식으로 구현해 임베디드 시스템에서도 실시간 계산이 가능하도록 한다. 대규모 몬테‑카를로 시뮬레이션으로 검증했으며, 확장된 물체 간 충돌에도 적용 가능함을 보인다.
상세 분석
논문은 기존의 “공간 겹침 확률”(spatial overlap)과 “경계 침투 확률”(boundary penetration) 접근법을 비판적으로 검토한 뒤, 충돌 사건을 ‘경계에 대한 레벨 크로싱’으로 모델링한다. 핵심 아이디어는 시간 구간 ΔT 내에서 충돌이 발생할 확률을 직접 구하는 것이 아니라, 순간적인 충돌 발생률, 즉 충돌 확률률률 λ(t)=dP⁺_C/dt 를 정의하고 이를 시간 적분하여 전체 충돌 확률을 얻는 것이다. 이를 위해 Altland‑Wilkmann은 Rice’s formula와 그 확장인 Belyaev‑Khasminskii 이론을 기반으로, n‑차원 연속 확률 과정 ζ(t)와 매끄러운 경계 ∂S 사이의 진입 강도(entry intensity)를 구한다.
수식 (3)은 경계면에 위치한 x₀에서 속도 성분 ˙x가 음수(외부→내부)인 경우의 흐름을 기대값 형태로 나타내며, 이는 레벨 크로싱 강도의 직관적 해석이다. 이후 이 식을 일반적인 확률 밀도 p_t(x,˙x)와 결합해, 임의의 예측 모델(선형·비선형, 시간‑의존, 제어 입력 포함)과 프로세스 노이즈 ν(t)를 포함한 경우에도 적용 가능한 상한식 λ̂(t)=∫{˙x≤0}∫{y∈I} (−˙x) p_t(x₀,y,˙x,˙y) d y d˙x d˙y 를 도출한다.
실제 구현을 위해 저자들은 Gaussian 상태 추정 모델을 가정하고, p_t를 2차원 정규분포로 근사해 폐형식 근사식을 얻는다(앱 C). 이 근사식은 행렬 연산만으로 실시간 계산이 가능하도록 설계돼, 자동차용 ECU와 같은 제한된 연산 자원에서도 적용할 수 있다.
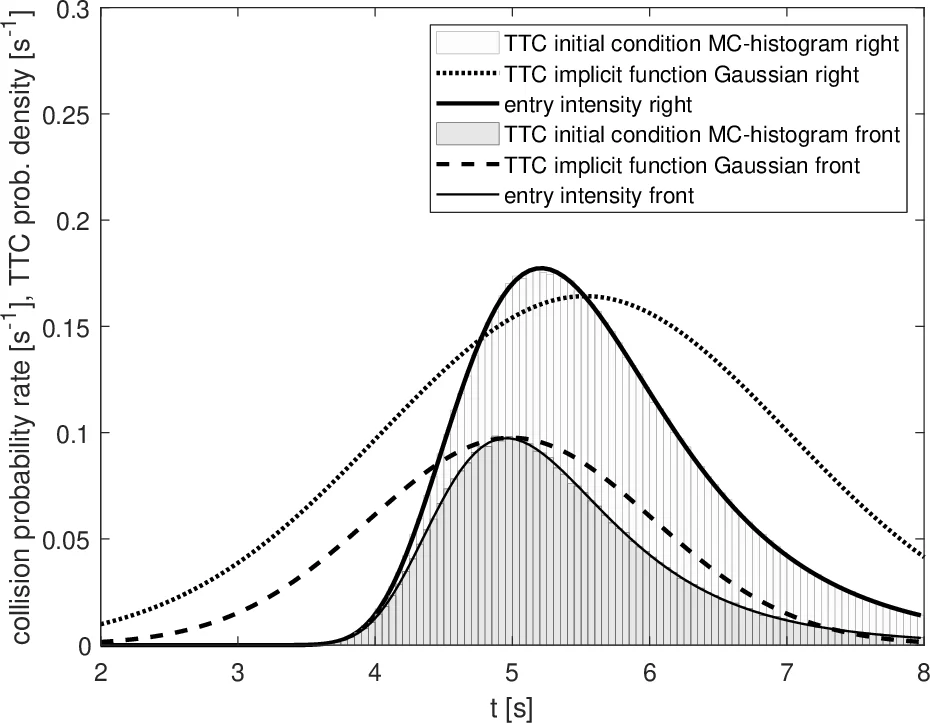
검증 단계에서는 10⁶ 건 이상의 몬테‑카를로 시뮬레이션을 수행해, 시뮬레이션 기반 충돌 확률률률 분포가 제시된 상한을 거의 포화(saturate)함을 확인한다. 또한, 경계가 직선인 경우와 사각형(차량 형태)인 경우, 그리고 두 물체를 각각 여러 ‘salient point’ 로 추상화해 확장된 물체 간 충돌을 다루는 방법을 제시한다.
마지막으로, 제안된 충돌 확률률률 분포를 기존의 1차원 TTC(Time‑to‑Collision) 확률 분포와 비교한다. 결과적으로, TTC 기반 접근법은 강한 가정(상수 속도, 독립적인 종방향·횡방향 운동) 때문에 실제 확률과 크게 차이 나는 반면, 충돌 확률률률은 이러한 가정 없이도 정확한 위험 평가가 가능함을 보여준다.
이러한 일련의 이론적 유도, 근사식 도출, 실시간 구현, 그리고 광범위한 시뮬레이션 검증을 통해 논문은 자동차 충돌 회피 시스템에서 “시간‑통합 충돌 위험”을 정량화하는 새로운 표준을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기