데이터 기반 좌표와 방정식 발견
초록
본 논문은 자동인코더와 SINDy(희소 비선형 동역학 식별)를 결합해 고차원 데이터의 저차원 좌표 변환을 동시에 학습하고, 변환된 좌표에서 최소한의 항으로 구성된 파싱 모델을 자동으로 도출한다. 이를 통해 기존 좌표에 의존하던 희소 회귀 방법의 한계를 극복하고, 해석 가능하고 일반화 가능한 동역학 모델을 얻는다.
상세 분석
이 연구는 데이터 기반 모델 발견의 핵심 과제인 “적절한 좌표계 선택”을 자동화한다는 점에서 혁신적이다. 전통적인 SINDy는 미리 정의된 좌표에서 희소한 항을 찾아내지만, 좌표 자체가 복잡하면 희소 표현이 불가능해진다. 저자들은 이 문제를 해결하기 위해 맞춤형 자동인코더를 설계하고, 인코더‑디코더 구조를 통해 원본 고차원 상태 x 를 저차원 잠재 변수 z 로 매핑한다. 중요한 점은 자동인코더 학습 과정에 동역학 손실 L_{dz/dt} 을 추가해 z 의 시간 미분이 사전 정의된 후보 함수 집합 Θ(z) 와 희소 계수 Ξ 의 선형 결합과 일치하도록 강제한다. 즉, 좌표 변환과 동역학 식별을 하나의 공동 최적화 문제로 풀어, 좌표 변환이 자연스럽게 희소 동역학을 지원하도록 만든다.
기술적으로는 다음 단계가 핵심이다. (1) 원본 데이터 x(t) 와 그 미분 \dot{x}(t) 를 준비한다. (2) 자동인코더의 인코더 ϕ 를 통해 z=ϕ(x) 를 얻고, 디코더 ψ 로 x≈ψ(z) 를 복원한다. (3) 자동미분을 이용해 ∇_x ϕ 를 계산하고, \dot{z}=∇_xϕ·\dot{x} 를 구한다. (4) 후보 함수 집합 Θ(z) (예: 다항식)와 희소 계수 Ξ 를 학습하여 \dot{z}=Θ(z)Ξ 를 만족하도록 손실을 최소화한다. (5) 전체 손실은 재구성 오차, 동역학 오차, 그리고 Ξ 의 ℓ₁ 정규화(희소성)로 구성된다.
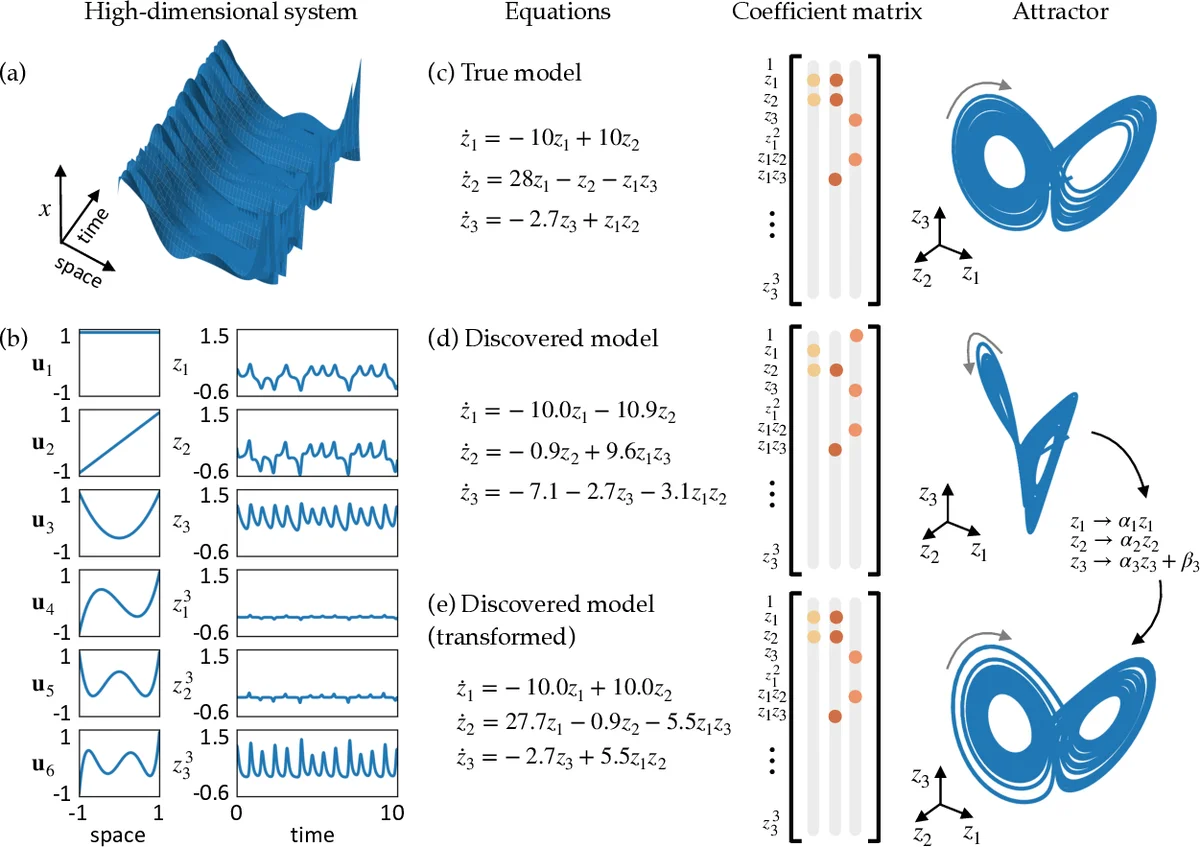
실험에서는 (i) 고차원 공간에 임베딩된 로렌츠 시스템, (ii) 반응‑확산 방정식에서 발생하는 나선 파동, (iii) 비선형 진자와 같은 세 가지 사례를 제시한다. 각 사례에서 자동인코더가 원본 데이터를 저차원 z (예: 3차원)로 압축하고, SINDy가 z 에 대한 간단한 다항식 형태의 동역학을 성공적으로 복원한다. 특히 로렌츠 예제에서는 원래 64차원 관측값을 3차원 z 로 변환한 뒤, 기존 SINDy가 실패하던 상황에서도 정확한 로렌츠 방정식을 찾아냈다. 이는 좌표 변환이 동역학의 희소성을 회복시키는 역할을 명확히 보여준다.
또한 저자들은 방법론의 한계와 향후 과제도 논의한다. 미분이 필요한 \dot{x} 의 정확한 추정이 어려운 경우, 노이즈에 민감할 수 있다. 이를 완화하기 위해 적분 기반 손실이나 변분 형태의 정규화를 도입할 여지가 있다. 후보 함수 집합 Θ 의 선택도 모델 품질에 큰 영향을 미치며, 물리적 제약(보존법칙, 대칭성)과 결합하면 더욱 강건한 모델을 얻을 수 있다. 마지막으로, 현재는 정적 데이터셋에 초점을 맞췄지만, 온라인 학습이나 제어 응용으로 확장하는 연구가 필요하다.
전반적으로 이 논문은 “좌표와 모델을 동등하게 발견한다”는 새로운 프레임워크를 제시함으로써, 데이터‑주도 과학에서 해석 가능하고 일반화 가능한 동역학 모델을 자동으로 도출하는 길을 열었다.
댓글 및 학술 토론
Loading comments...
의견 남기기