매니폴드 리치 추정: 볼록성 결함 함수와 최소극대율 분석
본 논문은 매니폴드의 리치를 볼록성 결함(convexity defect) 함수와 연결시켜, 최신 매니폴드 추정기(Aamari‑Levrard)를 활용한 새로운 리치 추정법을 제시한다. C^k (k>3) 정규성 모델에 대해 기대 손실의 상한을 제시하고, k=3,4 경우에 로그 팩터만 차이 나는 최소극대율 하한을 증명한다.
저자: Clément Berenfeld, John Harvey, Marc Hoffmann
**1. 서론 및 연구 동기**
리치는 Federer(1959)가 정의한 기하학적 불변량으로, 매니폴드가 자체적으로 얼마나 “두껍게” 존재하는지를 나타낸다. 이는 곡률에 의한 국소적인 제한과, 멀리 떨어진 두 부분이 유클리드 거리에서 가까워지는 전역적인 병목(bottleneck) 현상을 동시에 포괄한다. 현대 데이터 과학에서는 점 구름(point cloud)으로부터 매니폴드를 복원하거나 위상적 특성을 추정할 때, 리치를 사전 지식으로 가정하는 경우가 많다. 그러나 실제 데이터에서는 리치를 알 수 없으므로, 이를 추정하는 방법이 필요하다. 기존 연구(AKCMRW19)는 리치를 점과 해당 점의 접공간 정보를 이용해 직접 추정했지만, 리치가 전역 병목에 의해 결정되는 경우에만 최적 속도 n^{-2/(3d−1)}를 달성했다.
**2. 볼록성 결함 함수와 리치의 관계**
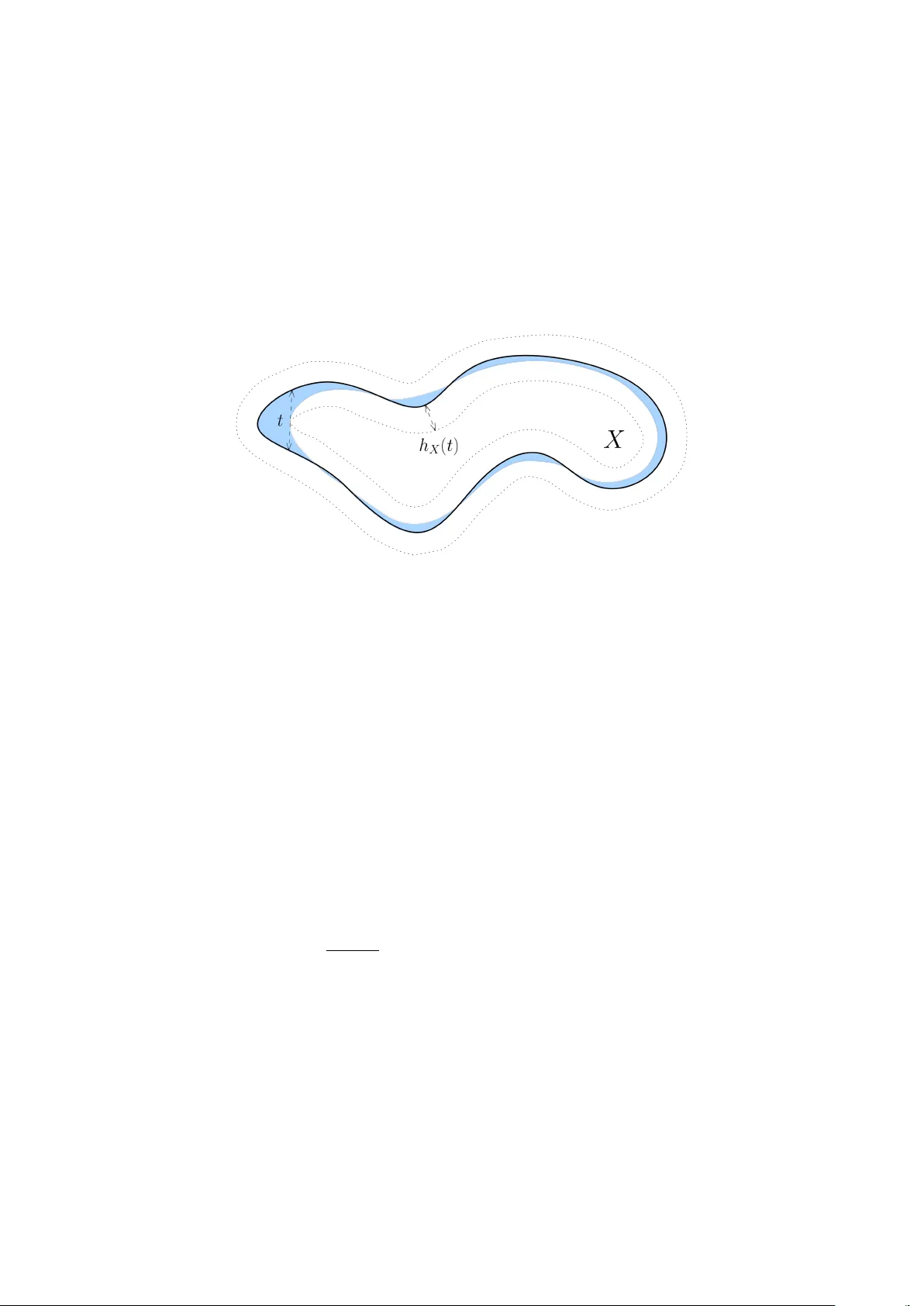
Attali·Lieutier·Salinas(2013)가 도입한 convexity defect 함수 h_X(r)는 스케일 r에서 집합 X가 얼마나 비볼록한지를 정량화한다. 저자들은 이 함수가 매니폴드 M에 대해 두 가지 중요한 성질을 가진다는 것을 증명한다.
- **지역 리치와 연속성**: r→0일 때 h_M(r)≈r²/(2R_loc)이며, 여기서 R_loc는 두 번째 기본 형식 II의 노름에 의해 정의되는 지역 리치이다 (Proposition 4.3). 따라서 h_M의 2차 항을 통해 곡률 기반 리치를 정확히 복원할 수 있다.
- **전역 리치와 불연속점**: 전역 리치(R_wfs)가 지역 리치보다 작을 경우, h_M는 r=R_wfs에서 급격히 변한다. 이는 h_M가 전역 리치를 “특징점”으로 갖는다는 의미이며, Proposition 4.4에서 정량적 상한이 제시된다.
**3. 새로운 정량적 성질 및 안정성**
볼록성 결함 함수는 Hausdorff 거리 ε에 대해 |h_M(r)−h_{M̂}(r)|≤C·ε/r 형태의 Lipschitz 연속성을 가진다(Section 5). 이는 임의의 매니폴드 추정기 M̂가 일정한 Hausdorff 오차를 보이면, h_{M̂}를 이용해 리치를 동일한 오차 수준으로 추정할 수 있음을 의미한다.
**4. 통계적 모델링**
논문은 C^k (k>3) 정규성 모델을 정의한다. 매니폴드 M은 C^k 매끄러움, 최소 리치 R_min>0, 그리고 파라미터 L=(L_⊥,L_3,…,L_k)에 의해 제약된 클래스 C_k^{R_min,L}에 속한다. 이 클래스는 각 점 p∈M에 대해 로컬 파라미터화 ψ_p(v)=p+v+N_p(v)와, 두 번째 기본 형식 II_p를 포함하는 고차 Taylor 전개 Φ_p(v)=p+v+½II_p(v⊗v)+…+R_k(v) 등을 만족한다.
**5. 매니폴드 추정기와 리치 추정기 설계**
Aamari·Levrard(2019)의 매니폴드 추정기 c_M는 위 클래스에 대해 Hausdorff 오차 O((log n/n)^{k/(2d)})를 달성한다. 저자들은 이를 “프록시” f_M으로 사용하고, 다음 절차로 리치를 추정한다.
1) 데이터 X_1,…,X_n으로부터 c_M를 계산한다.
2) c_M를 이용해 convexity defect 함수 h_{c_M}(r)를 수치적으로 평가한다 (예: 볼록 껍질 차이 측정).
3) 정의 6.7에 따라 h_{c_M}의 2차 항과 불연속점을 분석해 지역 리치 R_loc와 전역 리치 R_wfs를 각각 추정한다.
4) R̂ = min{R̂_loc, R̂_wfs}를 최종 리치 추정량으로 채택한다.
**6. 이론적 성능 분석**
- **상한 (Theorem 1)**: 위 절차를 통해 얻은 \hat R는 다음과 같은 기대 손실 상한을 만족한다.
- k=3: E| \hat R−R | ≤ C·log n·n^{-1/d}
- k>4: E| \hat R−R | ≤ C·log n·n^{-k/(2d)}
여기서 C는 차원 d, 정규성 차수 k, 그리고 모델 파라미터에 의존한다.
- **하한 (Theorem 2)**: Le Cam 검정을 이용해 동일한 클래스 내 어떤 추정기라도 n^{-(k−2)/d}보다 빠르게 수렴할 수 없음을 보인다. 따라서 k=3,4에서는 제시된 상한과 하한이 로그 팩터 하나만 차이 나며, “거의 최적”임을 의미한다.
**7. 구현상의 고려사항**
논문은 구체적인 알고리즘 구현을 다루지는 않지만, 실용적인 프로토콜을 제시한다. 주요 난점은 (i) 모델 파라미터(R_min, L 등)의 사전 지식이 필요하고, (ii) h_M의 정확한 수치 계산이 고차원에서 비용이 많이 든다는 점이다. 저자들은 부트스트랩을 통한 변동성 추정, 혹은 교차 검증 기반 파라미터 튜닝을 제안한다.
**8. 결론 및 향후 연구**
본 연구는 리치와 볼록성 결함 함수 사이의 새로운 정량적 연결고리를 제공함으로써, 기존 리치 추정기의 전역·국소 병목 문제를 통합적으로 해결한다. 또한 최소극대율 관점에서 거의 최적의 수렴 속도를 달성한다는 점에서 이론적·실용적 의의가 크다. 향후 연구는 (1) 고차원에서 효율적인 h_M 계산 방법, (2) 비정규 매니폴드(예: 경계가 있는 경우) 확장, (3) 실험적 검증을 통한 로그 팩터 감소 등을 탐구할 수 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기