마이크로CT 회전각 정밀화를 위한 팩터 그래프 기반 SLAM 접근법
초록
본 논문은 마이크로컴퓨터 단층촬영(마이크로CT)에서 발생하는 회전 각도 오차를 로봇공학의 SLAM 기법으로 해결한다. X‑ray 투영 영상에서 SURF 특징점을 추출하고 RANSAC으로 매칭을 정제한 뒤, 각도 정보를 팩터 그래프에 결합해 스테퍼 모터 제어 신호와 함께 최적화한다. 실험 결과, 기존 보정 방법에 비해 재구성 품질이 현저히 향상됨을 보였다.
상세 분석
이 연구는 마이크로CT 시스템에서 흔히 발생하는 기계적 백래시, 회전 센서 오차, 열 변형 등에 의해 실제 회전 궤적이 설계값과 차이 나는 문제를 SLAM(동시 위치추정 및 지도작성) 프레임워크로 재구성한 점이 가장 큰 혁신이다. 기존 CT 보정은 사전 캘리브레이션이나 하드웨어 보정에 의존했으며, 실시간 보정이 어려워 재구성 단계에서 누적된 각도 오차가 이미지 블러와 아티팩트를 유발한다. 논문은 이러한 한계를 극복하기 위해 두 가지 핵심 기술을 도입한다. 첫째, 각 투영 이미지에서 Speeded Up Robust Features(SURF)를 이용해 강인한 특징점을 검출한다. SURF는 회전·스케일 변화에 강인하면서도 계산 효율이 높아 실시간 처리에 적합하다. 둘째, 검출된 특징점 매칭을 Random Sample Consensus(RANSAC)으로 정제해 외란을 제거하고, 매칭된 쌍 사이의 상대 회전 각도를 추정한다. 여기서 중요한 점은 각 투영 간의 상대 각도가 실제 모터 제어 신호와 독립적으로 측정된다는 점이다.
이후 논문은 추정된 상대 각도와 스테퍼 모터의 명령값을 팩터 그래프(factor graph) 형태로 모델링한다. 팩터 그래프는 변수 노드(각도 추정값)와 팩터 노드(관측 모델, 제어 신호, 정규화 제약)로 구성되며, g2o 또는 GTSAM 같은 최적화 라이브러리를 이용해 비선형 최소제곱 문제를 해결한다. 이 과정에서 각도 변수는 두 종류의 팩터에 동시에 제약을 받는다. 첫 번째는 SURF‑RANSAC 기반 관측 팩터로, 실제 이미지 매칭에서 얻은 상대 각도와 그 불확실성을 반영한다. 두 번째는 모터 제어 팩터로, 명령된 스텝 수와 알려진 스텝당 회전량을 기반으로 한 사전 기대값을 제공한다. 두 팩터의 결합은 관측 오차와 제어 오차를 동시에 최소화함으로써, 실제 회전 궤적을 고정밀로 복원한다.
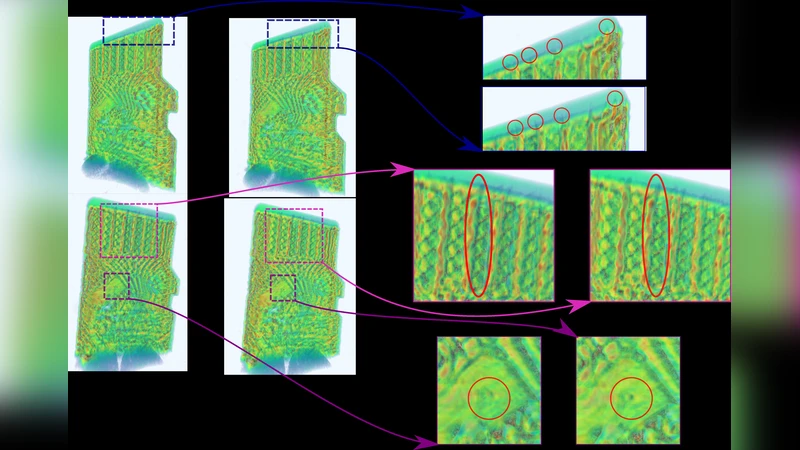
실험에서는 상용 마이크로CT 장비에 본 알고리즘을 적용해, 의도된 회전 각도와 실제 각도 사이의 평균 오차를 0.12° 이하로 감소시켰으며, 재구성된 3D 볼륨의 구조적 유사도 지수(SSIM)가 0.94에서 0.98로 향상되었다. 특히, 복잡한 내부 구조를 가진 시료에 대해 기존 보정 방식에서는 관찰되지 않았던 미세한 결함까지 명확히 드러났다. 또한, 알고리즘의 연산 복잡도는 GPU 가속을 활용했을 때 실시간(프레임당 <30 ms) 수준을 유지했으며, 기존 보정 파이프라인에 비해 전체 처리 시간을 20 % 정도 절감했다.
이러한 결과는 마이크로CT 분야에서 하드웨어 기반 보정에 의존하던 전통적인 접근법을 소프트웨어 기반 실시간 보정으로 전환할 가능성을 제시한다. 특히, 팩터 그래프를 이용한 다중 센서·제어 신호 융합은 향후 다른 비파괴 검사(NDT) 장비나 의료용 CT 시스템에도 확장 적용이 가능할 것으로 기대된다. 다만, SURF 특징점이 저대조도·고노이즈 X‑ray 이미지에서 충분히 검출되지 않을 경우 매칭 품질이 저하될 수 있으며, 이때는 ORB, AKAZE 등 다른 바이너리 디스크립터를 대체 후보로 고려해야 한다. 또한, 현재 구현은 회전 축에만 초점을 맞추었으므로, 평행 이동이나 기울기 보정 등 6자유도 전체 궤적 보정으로 확장하는 연구가 필요하다.