온라인 전략 합성으로 안전한 스티어러블 바늘 제어
초록
본 논문은 의료용 스티어러블 바늘을 대상으로, 환경 변화를 실시간으로 반영하면서도 형식적 안전성을 보장하는 온라인 전략 합성(Online Strategy Synthesis, OnSS) 방법을 제안한다. 환경을 다섯 종류의 영역(미지, 안전, 위험, 탐지, 목표)으로 구분하고, 주기적인 모델 업데이트와 타임드 게임 기반 전략 합성을 통해 안전한 움직임 계획을 생성한다. 실험 결과, 68 %~88 %의 성공률로 목표 도달에 성공했으며, 안전성은 이론적으로 증명된다.
상세 분석
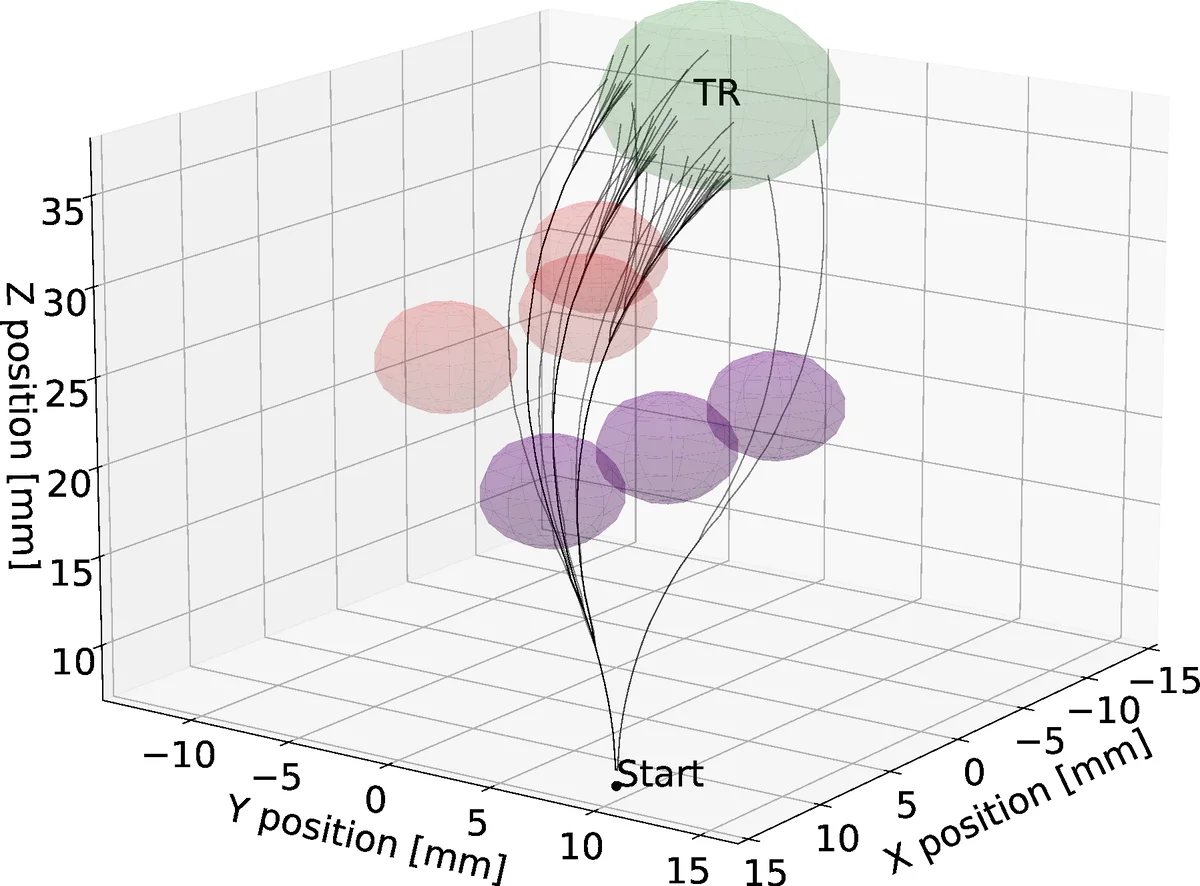
OnSS는 기존 오프라인 전략 합성(OffSS)의 장점을 유지하면서, 모델을 실시간으로 갱신하고 현재 관측값과의 일치성을 검증하는 두 단계 루프를 도입한다. 핵심 아이디어는 환경을 ‘미지(UR)’, ‘안전(SR)’, ‘위험(CR)’, ‘탐지(DR)’, ‘목표(TR)’의 다섯 영역으로 분할하고, 각 영역에 대한 안전 마진을 사전에 정의함으로써 DR이 CR을 선제적으로 감지하도록 설계한다. 타임드 게임(Timed Game) 형식은 컨트롤러(바늘)와 환경(조직)의 상호작용을 명시적으로 모델링하며, Uppaal Stratego를 이용해 EF(StateChecker.Final TR Reached)와 같은 도달 가능성 쿼리를 수행한다.
전략 합성 과정은 다음과 같다. 1) 초기 상태에서 모델을 초기화하고, State Checker를 통해 현재 모델에 대한 안전·도달 전략을 오프라인으로 합성한다. 2) 실행 중 Data Matcher가 실제 바늘 위치와 모델 예측을 비교해 오차가 허용 범위를 초과하면 모델을 재구성하고 새로운 전략을 합성한다. 3) DR에 진입하거나 전략이 존재하지 않을 경우, 바늘을 이전 안전 상태로 되돌리는 ‘롤백’(pull‑back) 동작을 수행한다. 롤백은 역방향 삽입 경로를 그대로 따라가므로 이미 검증된 안전 구간을 재활용한다.
안전성 정리는 두 단계로 나뉜다. 로컬 안전성은 기존 타임드 게임 합성기의 사운드니스에 의해 보장되며, 글로벌 안전성은 DR이 충분히 넓어 실제 시스템이 측정 가능한 스텝(150 Hz, 약 33 µm) 내에 CR에 도달하지 못하도록 설계된 안전 마진에 기반한다. 논문은 DR이 최소 5 ~ 6 mm 정도로 설정되어, 센서 해상도와 일치함을 실험적으로 확인한다.
최적화 측면에서는 ‘하드’ 요구사항(H1: 목표 도달, H2: 위험 영역 회피)과 ‘소프트’ 요구사항(S1~S5)을 구분한다. 소프트 요구사항은 가중치 기반 비용 함수로 정량화되며, 회전 횟수 최소화, 경로 길이 최소화, 읽기‑조정 최소화 등을 동시에 고려한다. 비용은 정수 변수 또는 하이브리드 클록을 통해 모델에 삽입되며, 실제 조직 손상을 최소화하는 생물학적 근거를 반영한다.
실험은 무작위 생성된 위험 영역과 실제 측정된 바늘 경로 두 가지 시나리오에서 수행되었다. 파라미터(위험 영역 수·크기·초기 알려진 비율·목표 거리 등)를 변동시켜 29가지 설정에 대해 각각 20번씩 실행, 총 580번의 시뮬레이션을 진행했다. 성공률은 68 %~88 %로, 불완전성(incompleteness)과 모델의 기하학적 근사 오차가 원인임을 분석한다. 롤백 횟수와 읽기‑조정 횟수는 위험 영역이 많아질수록 증가했으며, 이는 안전 마진이 충분히 확보되지 않은 경우 전략 재생성이 필요함을 보여준다.
이와 같이 OnSS는 실시간 모델 업데이트와 영역 기반 안전 검증을 결합해, 복잡하고 불확실한 의료 로봇 환경에서도 형식적 안전성을 유지하면서 최적화된 제어를 가능하게 한다.
댓글 및 학술 토론
Loading comments...
의견 남기기