앵커 없는 이동 네트워크의 상대 운동학 추정
본 논문은 시간에 따라 변하는 거리 측정값만을 이용해, 절대 기준점이 전혀 없는(앵커 없는) 이동 노드 군집의 상대 위치, 속도 및 가속도 등 고차 운동학 파라미터를 추정하는 새로운 데이터 모델과 해법을 제시한다. 라플라스‑라푸노프 형태의 방정식으로 표현되는 이 모델은 본질적으로 불완전하지만, 상대적 정지 제약을 이용해 유일한 해를 얻을 수 있다. 저자는 폐쇄형 최소제곱 해법을 제안하고, 이를 바탕으로 절대 운동학 추정법 및 Cramér‑Rao…
저자: Raj Thilak Rajan, Geert Leus, Alle-Jan van der Veen
1. 서론
본 논문은 거리 기반 측정이 가능한 다수의 이동 노드가 존재하지만, 절대적인 위치나 기준점(앵커)이 전혀 없는 상황을 다룬다. 기존 연구는 정적인 네트워크에서 거리 행렬(EDM)을 이용해 MDS와 같은 차원 축소 기법으로 상대 위치를 복원했으며, 동적인 경우에는 알려진 앵커와 도플러 측정, 혹은 소규모 변동을 전제로 하는 서브스페이스 트래킹 기법을 사용했다. 그러나 이러한 방법들은 앵커가 없거나 고속·비선형 움직임을 다루기에 한계가 있다.
2. 주요 기여
- 시간에 따라 변하는 거리 행렬 D(t)와 노드의 상대 운동학(위치, 속도, 가속도 등) 사이의 새로운 데이터 모델을 제시한다.
- 라푸노프‑유사 방정식 형태의 연립 방정식을 도출하고, 이를 해결하기 위한 폐쇄형 최소제곱 해법을 제안한다.
- 상대 정지 제약(예: 전체 군집의 평균 속도·가속도가 0) 을 이용해 본질적으로 불완전한 모델을 유일하게 만든다.
- 절대 운동학 추정 방법과, 가우시안 잡음 하에서의 제한된 Cramér‑Rao Bound(CRLB) 및 오라클 CRLB을 유도한다.
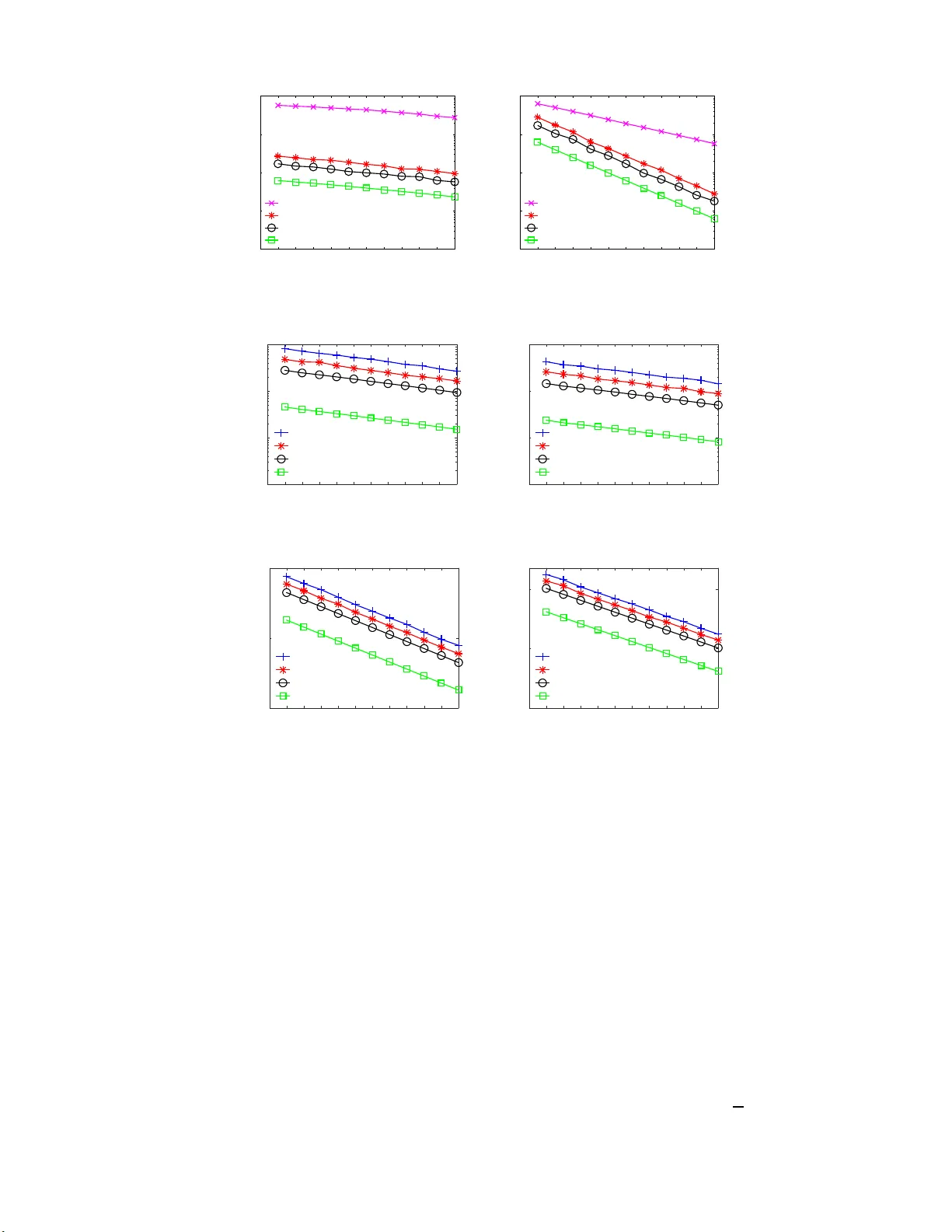
- 시뮬레이션을 통해 제안 알고리즘이 기존 1차 미분 기반 방법보다 높은 정확도와 강인성을 보임을 입증한다.
3. 데이터 모델 및 수학적 전개
3.1 절대 및 상대 운동학 정의
- 절대 위치 행렬 S(t)∈ℝ^{P×N}를 테일러 급수 전개: S(t)=X+∑_{m=1}^{M} (1/m!) Y_m (t−t₀)^m, 여기서 X는 초기 절대 위치, Y_m는 m차 절대 운동학 행렬이다.
- 절대 행렬을 회전·이동 변환 H₀, h₀을 통해 상대 행렬 X, Y_m 으로 변환한다. H₀는 정규 직교, h₀는 평행이동 벡터이며, 본 논문에서는 H₀=I, h₀=0 으로 가정한다.
3.2 거리 행렬과 중심화 행렬
- 거리 행렬 D(t)=
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기