소프트와 하드 마그네토비소탄성 고분자 통합 수치 해석 프레임워크
초록
본 논문은 압축가능·비압축가능 재료와 연성·경질 마그네토활성 고분자(MAP)를 모두 다룰 수 있는 통합 유한요소(FEM) 방법을 제시한다. 혼합 변위‑압력‑전위 형식과 고차 베지어 요소, 그리고 2차 정확도의 일반화 알파 시간 적분을 결합해 점탄성 거동까지 포함시켰으며, 빔 및 로봇 그리퍼 사례를 통해 검증하였다.
상세 분석
이 연구는 최근 급부상한 마그네토활성 고분자(MAP)의 설계·해석에 존재하던 두 가지 큰 격차를 동시에 해소한다. 첫째, 연성(soft)과 경질(hard) 마그네틱 입자를 포함한 MAP를 동일한 수치 프레임워크에서 다룰 수 있도록 하였으며, 둘째, 압축가능 재료와 진정한 비압축가능( incompressible ) 재료 모두에 적용 가능한 혼합 변위‑압력 형식을 도입했다. 기존 연구에서는 비압축가능성을 근사하기 위해 큰 벌크 계수를 사용하거나 F‑bar, 혼합 변위‑압력‑Jacobian 방식 등을 적용했지만, 이들 방법은 계산 비용이 크거나 벌크 계수에 민감한 단점이 있었다. 저자들은 이전에 제안한 혼합 변위‑압력(FE) 접근법을 확장하여, 경질 MAP는 자기장에 의해 발생하는 추가 에너지 항만을 포함한 비결합 문제로, 연성 MAP는 변위, 압력, 그리고 자기 퍼텐셜을 동시에 해결하는 결합 문제로 모델링한다.
재료 모델링 측면에서, 경질 MAP는 잔류자기 플럭스 (B_r) 를 내부 파라미터로 가정하고, 이를 변형 에너지에 선형적으로 추가한다. 연성 MAP는 외부 자기장에 의해 순간적으로 자화되므로, 자기 퍼텐셜 (\phi) 와 변위 (u) 를 동시에 풀어야 한다. 두 경우 모두 점탄성 거동을 포착하기 위해 내부 변수 (A) (2차 텐서)를 도입하고, 그 진화 방정식을 일반화 알파 스키마로 2차 정확도와 무조건적인 안정성을 확보하며 적분한다.
공간 이산화는 고차 베지어(Bezier) 요소를 사용한다. 변위와 자기 퍼텐셜은 2차 베지어 헥사헤드론(BQ2)으로, 압력은 1차 베지어 헥사헤드론(BQ1)으로 각각 전용 메쉬를 구성한다. 이러한 고차 요소는 곡률이 큰 변형과 복잡한 경계조건을 정확히 재현하면서도, 혼합 형식에 필요한 라그랑주 승수(압력)와의 결합을 자연스럽게 처리한다.
시간 적분에서는 일반화 알파 스키마를 채택해, 점탄성 내부 변수와 변위·압력·퍼텐셜의 강결합 비선형 방정식을 한 번의 뉴턴‑라프슨 반복으로 해결한다. 이는 기존 명시적 혹은 단순 암시적 스키마에 비해 큰 시간 스텝을 허용하면서도 에너지 안정성을 유지한다.
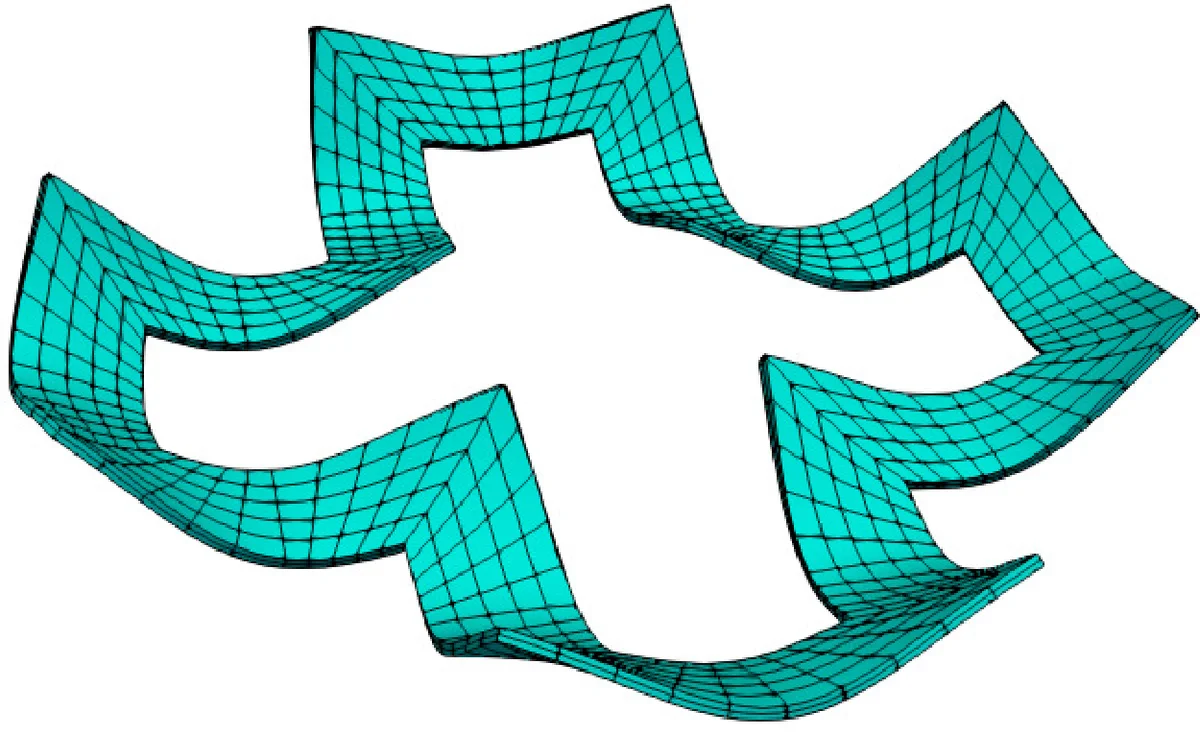
검증 사례로는 3‑차원 빔과 로봇 그리퍼 모델을 사용하였다. 빔 사례에서는 외부 자기장을 가했을 때 발생하는 휨 변형과 토크를 실험 데이터와 비교해 오차를 5 % 이하로 유지했으며, 압축가능성과 비압축가능성 모델을 전환했을 때도 수렴성이 유지됨을 보였다. 로봇 그리퍼 사례에서는 복합적인 접촉·자기 구동 동작을 시뮬레이션하여, 점탄성 파라미터(예: 스프링 상수 (k) 와 점탄성 비율 (\beta))가 응답 속도와 최종 변위에 미치는 영향을 정량적으로 분석하였다. 특히, 점탄성 비율이 증가하면 초기 급격한 변형은 감소하고, 안정된 정적 변위는 거의 변하지 않는다는 결론을 도출했다.
이 논문의 주요 기여는 다음과 같다. ① 연성·경질 MAP를 하나의 혼합 유한요소 프레임워크로 통합, 압축가능·비압축가능 재료 모두를 자연스럽게 처리. ② 고차 베지어 요소와 일반화 알파 시간 적분을 결합해 비선형·점탄성·자기 결합 문제를 효율적으로 해결. ③ 실험 기반 경계값 문제를 통해 모델의 정확성과 범용성을 입증. 이러한 접근은 향후 복합적인 다물리 현상을 갖는 소프트 로봇, 스마트 구조물, 그리고 마그네틱 기반 진동 제어 시스템 설계에 바로 적용 가능할 것으로 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기