다양하고 정밀한 로봇 푸시 데이터셋 Omnipush 소개
Omnipush는 250개의 서로 다른 형태와 질량 분포를 가진 물체 각각에 대해 250번씩, 총 60 000여 번의 평면 푸시 실험을 RGB‑D 영상과 고정밀 모션 트래킹 데이터로 수집한 대규모 공개 데이터셋이다. 물체의 형상·무게 중심 변화를 체계적으로 설계했으며, 메타‑러닝 기반 동적 모델링·불확실성 추정·영상 예측 등 여러 로봇 학습 과제에 바로 활용할 수 있는 벤치마크를 제공한다.
저자: Maria Bauza, Ferran Alet, Yen-Chen Lin
본 논문은 로봇 조작에서 핵심적인 기술인 평면 푸시(pushing)를 보다 정밀하고 일반화 가능한 방식으로 연구하기 위해, 새로운 대규모 데이터셋 “Omnipush”를 소개한다. 기존에 공개된 푸시 데이터셋은 물체 수가 적고, 질량 분포가 균일하며, 주로 트래킹 기반의 포즈 정보만을 제공하는 한계가 있었다. 이러한 한계를 극복하고자 저자들은 250개의 서로 다른 물체와 각각에 대해 250번씩 푸시를 수행해 총 62 500여 개의 푸시 데이터를 수집하였다.
데이터 수집 시스템은 ABB IRB‑120 6‑DOF 산업용 로봇 팔에 강체 스틸 푸셔를 장착하고, ABS 평면 위에서 푸시를 수행한다. 물체의 포즈는 4대의 Vicon 카메라와 4개의 반사 마커를 이용해 250 Hz로 기록되며, 정확도는 0.5 mm·0.5° 수준이다. 동시에 Intel RealSense D415 RGB‑D 카메라가 30 Hz, 640×480 해상도로 영상과 깊이 데이터를 동기화하여 저장한다. 모든 데이터는 ROS bag, HDF5, JSON 형식으로 제공되어 연구자가 손쉽게 접근할 수 있다.
물체 설계는 모듈식 알루미늄 조각과 중앙의 PLA 베이스 피스(마커 부착)로 구성된다. 각 물체는 4개의 면(볼록, 삼각, 원형, 직사각) 중 하나씩을 선택해 조합하며, 추가 중량(소 60 g, 대 150 g)을 특정 면에 부착하거나 두 개의 소중량을 동시에 부착하는 방식으로 질량 중심을 다양하게 변형한다. 이 설계는 (1) 형상에 따른 접촉 기하학, (2) 질량 중심 위치에 따른 압‑마찰 분포 두 가지 핵심 요인을 독립적으로 조절할 수 있게 한다. 결과적으로 70개의 균일 질량 물체, 90개의 단일 중량 물체, 90개의 이중 소중량 물체가 포함된 250개의 물체가 구성된다.
푸시 프로토콜은 다음과 같다. 푸셔를 물체 중심으로부터 9~10 cm 거리의 무작위 위치에 놓고, 무작위 방향으로 5 cm, 1 s 동안 일정 속도로 밀어낸다(준정역학(quasi‑static) 조건). 같은 푸셔 위치에서 5번 연속 푸시를 수행하고, 물체가 작업 영역을 벗어나면 로봇이 물체를 중앙으로 복귀시킨 뒤 새로 시작한다. 푸시 방향 선택은 이전 푸시와의 연속성을 고려해 80 % 확률로 ±90° 이내로 제한함으로써 접촉률을 높인다.
데이터는 각 푸시마다 (i) 물체 포즈(x, y, θ), 푸셔 위치(x, y) 시계열, (ii) RGB‑D 영상, (iii) 최종 물체 변위(Δx, Δy, Δθ) 라는 형태로 제공된다. 포즈는 절대 좌표계와 물체 기준 좌표계 두 가지 형태로 변환 가능하며, 입력 차원은 3, 5, 7 중 선택할 수 있다.
논문은 두 가지 주요 물리적 인사이트를 실험적으로 보여준다. 첫째, 질량 중심이 푸시 방향에 가깝게 위치할수록 회전 각도가 크게 증가하고, 물체가 직선 경로를 벗어나는 경향이 강해진다. 이는 동일한 형상이라도 무게 배치가 동역학에 미치는 영향을 강조한다. 둘째, 접촉 면의 곡률과 법선 방향이 마찰 콘의 방향을 결정하고, 이에 따라 물체가 미끄러지거나 고정되는 영역이 달라진다. 특히 원형·각진 면은 접촉 법선이 크게 변해 푸시 결과가 다양해지는 반면, 평탄·볼록 면은 보다 일관된 동작을 보인다.
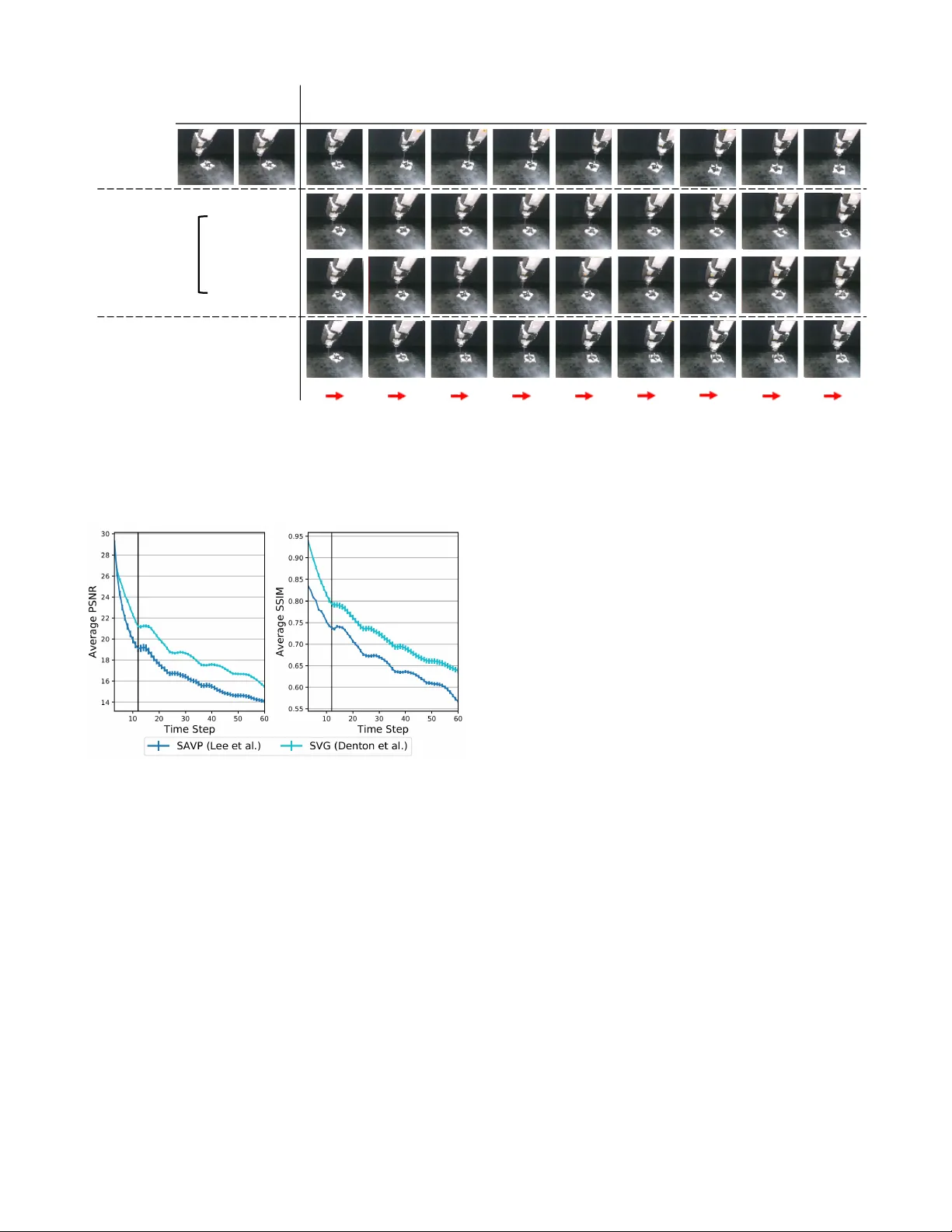
Omnipush는 이러한 물리적 변수를 체계적으로 제어한 데이터와, 메타‑러닝 기반 동적 모델링 벤치마크를 함께 제공한다. 메타‑러닝 과제는 보지 못한 물체에 대해 몇 번의 푸시 샘플만으로 빠르게 모델을 적응시키고, 예측값과 함께 불확실성(분산)도 추정하도록 설계되었다. 이는 로봇이 실제 환경에서 위험을 최소화하며 계획을 수행하는 데 필수적인 능력이다. 또한, RGB‑D 영상 예측 벤치마크를 통해 시각적 입력만으로도 물체의 동역학을 학습할 수 있는 연구 방향을 제시한다.
추가적으로 저자들은 (a) 기존 데이터셋
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기