지연 경계 제어를 이용한 반응‑확산 방정식의 PI 규제 설계
** 본 논문은 오른쪽 경계에 지연이 포함된 디리클레 입력을 사용해 1차원 반응‑확산 방정식의 왼쪽 노이만 추적값을 PI(비례‑적분) 제어기로 규제하는 방법을 제시한다. 불안정 모드만을 포함하는 유한 차원 모델을 스펙트럼 분해로 추출하고, Artstein 변환으로 지연을 보상한 뒤, 적절한 극배치를 통해 PI 제어기를 설계한다. 제안된 제어법은 지수적 ISS(입력‑상태 안정성)와 페이딩 메모리 특성을 갖는 안정성을 증명하고, 시간 변동 레퍼…
저자: Hugo Lhachemi, Christophe Prieur, Emmanuel Trelat
**
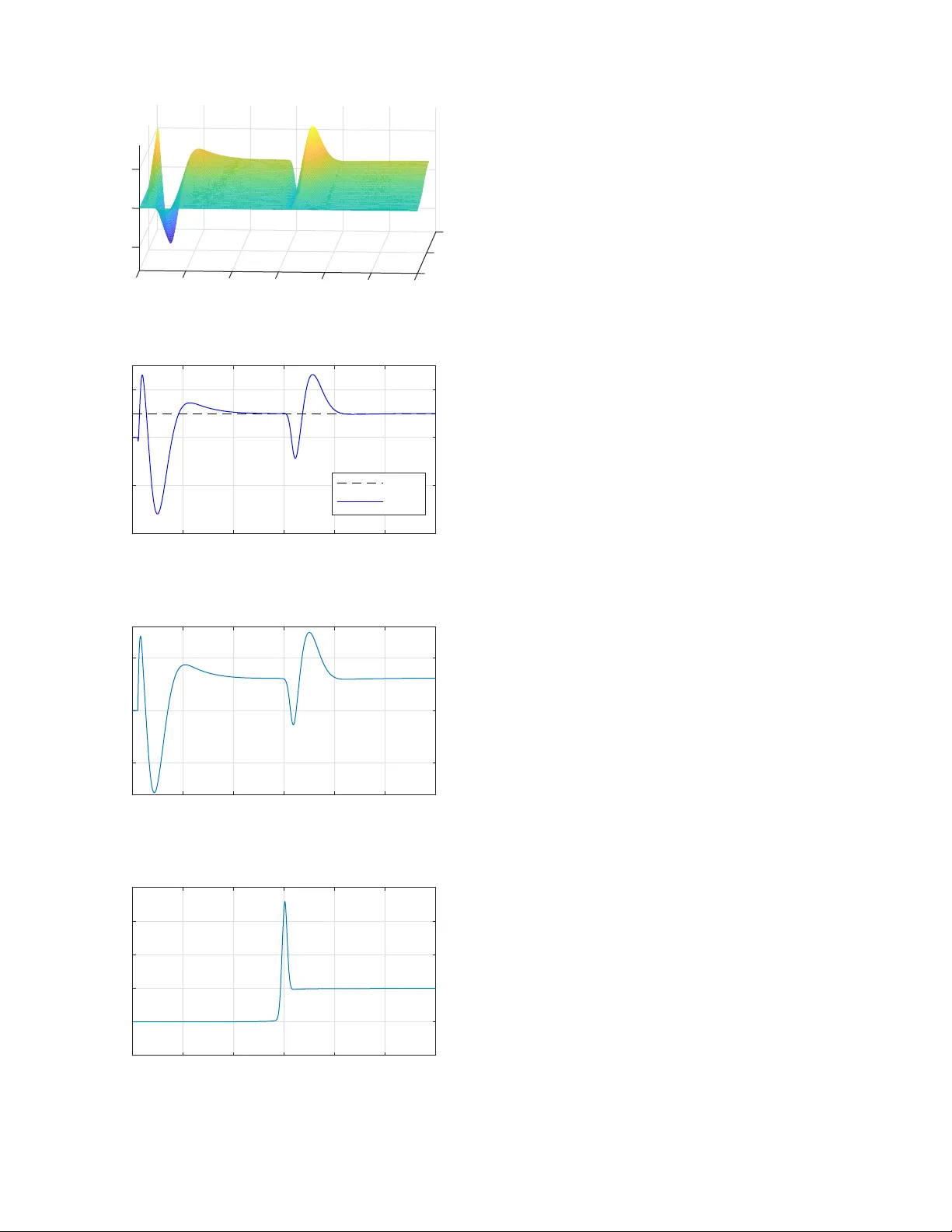
본 논문은 1차원 반응‑확산 방정식에 대해 오른쪽 경계에 디리클레 입력을 적용하고, 그 입력에 일정한 지연 D가 존재하는 상황에서, 왼쪽 경계의 노이만 미분값 y_x(t,0)을 목표 레퍼런스 r(t)와 일치시키는 PI(비례‑적분) 규제 문제를 다룬다. 시스템은
y_t = y_{xx} + c(x) y + d(t,x), y(t,0)=0, y(t,L)=u(t−D)
의 형태를 가지며, c(x)∈L^∞(0,L)이고 d(t,·)는 시간에 따라 변하는 분포 교란이다. 목표는 적분 행동을 포함한 제어기로 y_x(t,0)→r(t) 를 보장하면서, 시스템 전체가 지수적으로 안정화되는 것이다.
### 1. 제어 설계 전략
1) **스펙트럼 분해와 유한 차원 모델**
연산자 A=∂_{xx}+c(x)I는 자가‑수반이며 콤팩트한 resolvent를 갖는다. 고유함수 {e_j}와 고유값 {λ_j}를 이용해 상태를 w(t,x)=∑ w_j(t) e_j(x) 로 전개한다. λ_j>0인 불안정 모드의 개수를 n이라 정의하고, 이들 모드와 지연 입력 u_D(t)=u(t−D) 를 포함하는 상태벡터 X₁∈ℝ^{n+1}을 만든다.
2) **적분 상태 도입**
추적 오차 e(t)=y_x(t,0)−r(t)의 적분을 z(t)=∫₀^t e(τ)dτ 로 정의한다. 그러나 ż(t)에는 고차 모드 w_j (j>n) 가 포함되므로 직접적인 확대가 불가능하다. 이를 해결하기 위해 ζ(t)=z(t)−∑_{j>n} (e₀j(0)/λ_j) w_j(t) 라는 보정 변수를 도입한다. ζ̇(t)는 X₁, u_D, v_D (예측 입력) 및 외부 교란만으로 표현된다.
3) **Artstein 변환을 통한 지연 보상**
입력 지연을 다루기 위해 v(t)=\dot u(t) 라는 새로운 제어 변수를 도입하고, u(t)=∫₀^t v(τ)dτ 로 복원한다. 이 변환은 지연을 내부 상태에 포함시키는 예측 피드백 구조를 제공한다.
4) **확장된 유한 차원 시스템**
확장된 상태 X(t)=
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기