도시 환경에서 분산 다중 목표 추적 현황과 과제
본 논문은 도시 지역에서 이동형 센서를 활용한 다중 목표 추적의 최신 연구 동향을 정리하고, 센서 제어를 위한 POMDP 기반 프레임워크와 기존의 마이옵식·비마이옵식 제어 방법들을 비교한다. 특히 지형·건물에 의한 가시성 제한, 네트워크 연결성 유지, 실시간 계산 복잡도 등 도시 환경 고유의 제약을 강조하며, 향후 연구가 집중해야 할 세 가지 핵심 과제를 제시한다.
저자: Donald J. Bucci Jr., Pramod K. Varshney
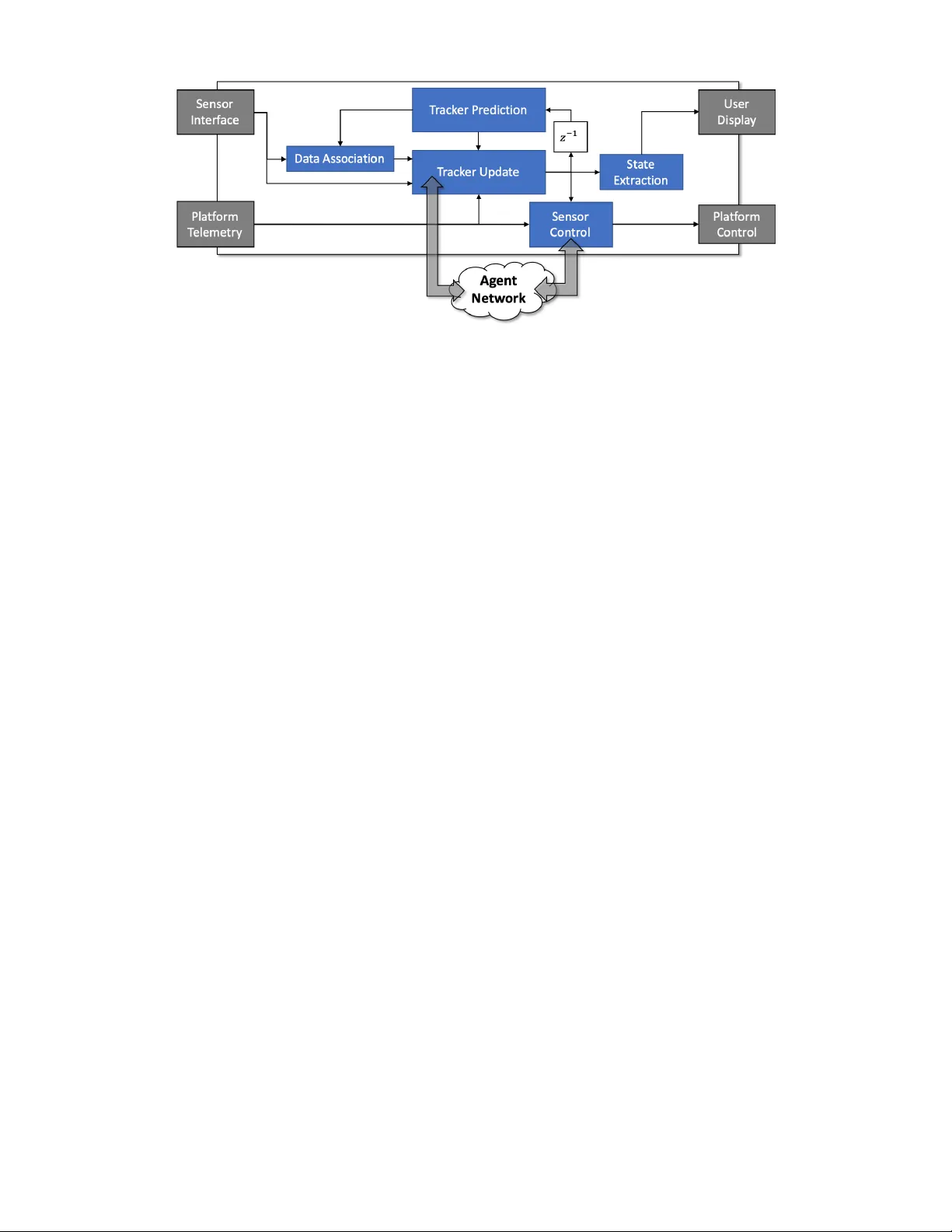
이 논문은 도시 환경에서의 비협조적 감시 응용을 중심으로, 이동형 센서 네트워크를 이용한 다중 목표 추적 기술의 현황과 남아 있는 과제를 포괄적으로 검토한다. 서론에서는 CCTV와 수동 RF 센서(RSSI, TDOA, FDOA, AOA 등)를 활용한 기존 정적 센서 네트워크가 목표 위치와 속도 추정에 한계가 있음을 지적하고, 이동형 센서가 제공하는 동적 배치와 시야 확보의 중요성을 강조한다. 이어서 센서 제어 문제를 전반적인 프레임워크로 제시한다. 전형적인 분산 추적 아키텍처(그림 1)에서는 센서 인터페이스가 원시 측정값을 제공하고, 베이즈 필터를 통해 목표의 사후 분포를 예측·업데이트한다. 데이터 연관 과정은 측정 원천 불확실성을 고려하며, 업데이트된 사후 분포는 상태 추출과 공분산 타원으로 변환된다. 이후 이 사후 분포를 기반으로 플랫폼의 제어 행동(방위, 가속도, 웨이포인트 등)을 결정하는 센서 제어 정책이 적용된다.
논문은 이러한 제어 문제를 부분관측 마코프 의사결정 과정(POMDP)으로 모델링한다. 목표 상태는 마코프 프로세스로 진화하고, 센서 상태는 제어 입력에 따라 변한다. 보상 함수는 목표 추적 정확도(불확실성 감소), 장애물·충돌 회피, 제어 제한 등을 포함한다. 믿음 상태(belief state)를 충분통계량으로 사용해 POMDP를 MDP 형태로 변환하고, 이때 믿음 상태는 목표 사후 확률분포가 된다. 정보 이론적 보상으로는 주로 목표와 측정 사이의 상호 정보가 사용되며, Rényi·Cauchy‑Schwarz 발산 등도 대안으로 제시된다.
관련 연구 부분에서는 마이옵식 제어와 비마이옵식 제어를 각각 상세히 살펴본다. 마이옵식 방법은 RFS 기반 PHD, LMB, CB‑MeMBer 필터와 결합해 단일 시점에서의 정보 증가를 최적화한다. 대표적인 예로 Rényi 발산을 이용한 목표 사후와 예측 사후의 차이를 최소화하거나, PCRLB의 기울기를 이용한 제어 방향을 선택한다. 이러한 방법은 계산량이 적어 실시간 적용이 가능하지만, 도시의 복잡한 지형·건물 그림자와 같은 장기적인 가시성 변화를 반영하지 못한다.
비마이옵식 접근은 제한된 호라이즌을 두고 롤아웃, MPC, 감소된 가치 반복(RVI), Anytime‑RVI 등으로 미래 행동을 평가한다. GLMB·LMB 필터와 결합한 Cauchy‑Schwarz 발산 기반 보상, 입자 필터와 상호 정보 기반의 비마이옵식 정책, 그리고 실제 UGV·UAV 실험을 통한 검증 사례가 제시된다. 비마이옵식 방법은 장기적인 탐색 효율을 높이지만, 믿음 상태가 연속적인 고차원 확률분포 공간에 존재하므로 근사와 계산량 절감이 필수적이다.
마지막으로 논문은 도시 감시에서 직면하는 세 가지 핵심 도전 과제를 제시한다. 첫째, 건물·지형에 의한 가시성 모델링이 정확해야 하며, 이는 측정 모델에 그림자 효과와 다중 경로를 포함해야 함을 의미한다. 둘째, 네트워크 연결이 불안정한 상황에서도 분산 합의와 로컬 정보 교환을 통해 협동 제어를 유지해야 한다. 셋째, 안전·충돌 회피를 포함한 제어 제약을 만족하면서 목표 추적 정확도를 극대화하는 다목적 최적화가 필요하다. 저자는 이러한 과제를 해결하기 위해 정보 융합·추적·제어 분야 연구자 간의 긴밀한 협업과, 실시간 구현을 위한 효율적인 알고리즘 개발이 필수적이라고 결론짓는다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기