악성 차량에도 견딜 수 있는 자율차 협동 주행
본 논문은 이중 적분기 동역학을 갖는 자율차 네트워크에서, 제한된 수의 악성 차량이 존재하더라도 비동기·지연 통신 환경에서 모든 정상 차량이 동일한 속도와 안전 거리(Δij)를 유지하도록 하는 회복탄력적 합의 알고리즘을 제시한다. 극값 필터링 기반의 비동기 MSR(Mean Subsequence Reduced) 방식을 적용하고, (r,s)-robust 그래프 토폴로지가 필요함을 증명한다. 시뮬레이션을 통해 제안 기법의 유효성을 확인한다.
저자: Mostafa Safi, Seyed Mehran Dibaji, Mohammad Pirani
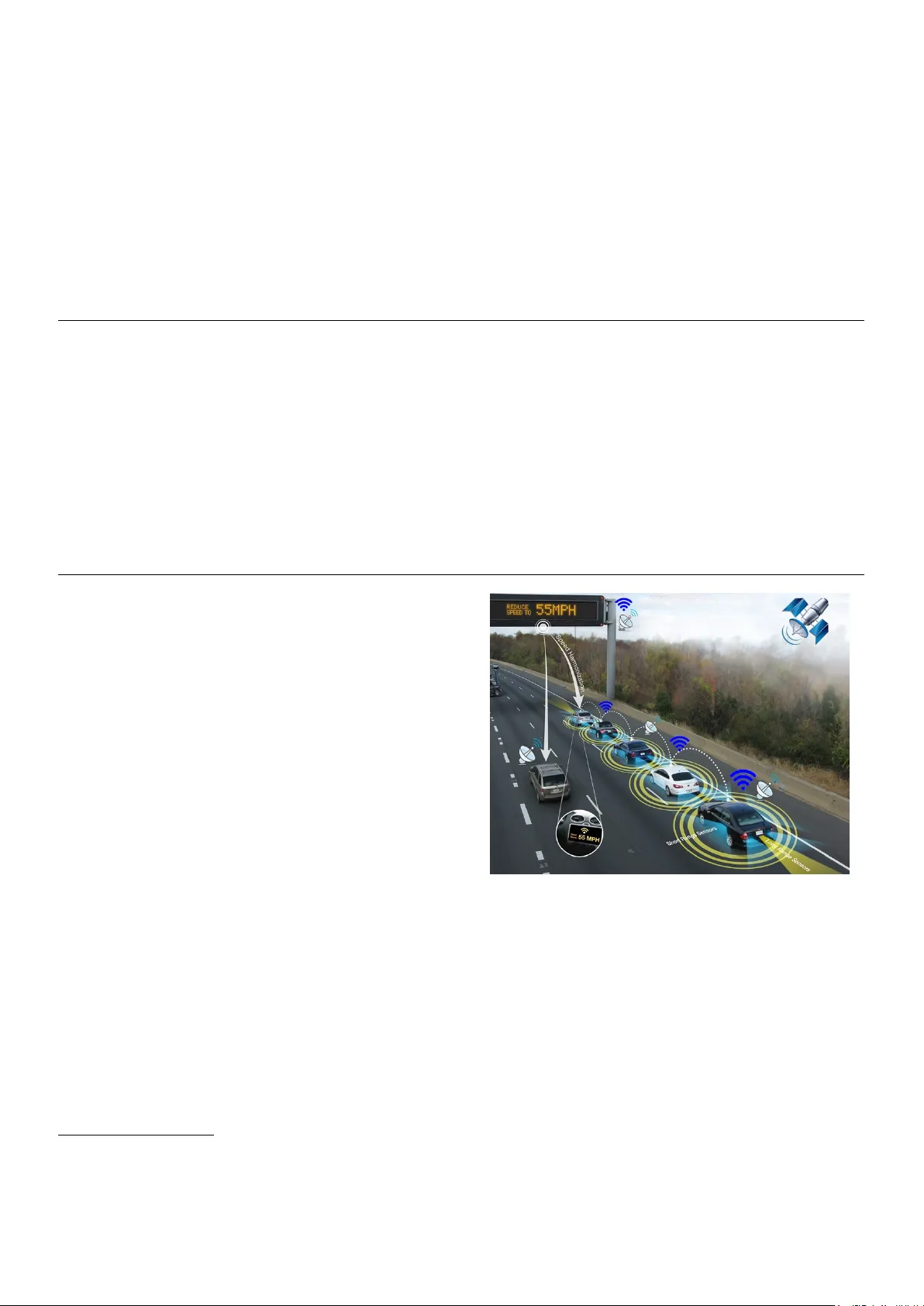
본 논문은 커넥티드 자율주행 차량 네트워크에서 악성 차량이 존재할 경우에도 모든 정상 차량이 동일한 목표 속도와 안전 거리를 유지하도록 하는 회복탄력적 협동 주행 메커니즘을 제안한다. 먼저, 차량의 longitudinal motion을 이중 적분기(double‑integrator) 동역학으로 모델링하고, 차량 간 통신을 유향 그래프 G=(V,E) 로 표현한다. 각 차량 i는 위치 xi(t)와 속도 vi(t)를 상태 변수로 가지며, 이산화된 형태는 샘플링 주기 T에 따라 xi
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기