Gradient Consensus 방향성 그래프에서 선형 수렴 분산 최적화 알고리즘
본 논문은 방향성 그래프 상에서 각 에이전트가 로컬 비용 함수 $f_i$를 보유한 경우, 전체 비용 $f=\sum_{i=1}^n f_i$를 최소화하기 위한 새로운 “optimize‑then‑agree” 프레임워크를 제시한다. Gradient‑Consensus 알고리즘은 매 반복마다 로컬 그래디언트 단계와 유한 시간 근사 합의 단계를 분리하여, 모든 반복에서 에이전트 간 불일치를 사전에 지정한 허용오차 이하로 유지한다. 강한 볼록성 및 Lipsc…
저자: Vivek Khatana, Govind Saraswat, Sourav Patel
본 논문은 방향성 그래프(Directed Graph) 상에 존재하는 $n$개의 에이전트가 각각 로컬 비용 함수 $f_i:\mathbb{R}^p\rightarrow\mathbb{R}$를 보유하고 있을 때, 전체 비용 $f(x)=\sum_{i=1}^n f_i(x)$를 최소화하는 분산 최적화 문제를 다룬다. 기존의 분산 최적화 알고리즘은 최적화 단계와 합의 단계가 동시에 진행되는 구조를 가지고 있어, 중간 반복 단계에서 에이전트 간 추정치 차이가 크게 발생한다. 이러한 “Consensus Constraint Violation”은 전력 시스템의 경제 디스패치, 다중 로봇의 집합 행동 등 실시간 합의가 필수적인 응용 분야에서 치명적인 문제를 야기한다.
이를 해결하고자 저자들은 “optimize‑then‑agree”라는 새로운 설계 원칙을 제시한다. 이 원칙에 따라 각 에이전트는 (1) 로컬 그래디언트 하강 단계에서 현재 추정치 $x_i(k)$에 대해 $\nabla f_i\!\left(x_i(k)\right)$를 이용해 $x_i^{\text{temp}}=x_i(k)-\alpha_k\nabla f_i\!\left(x_i(k)\right)$ 로 업데이트하고, (2) 이후 유한 시간 근사 합의 프로토콜을 적용해 $x_i(k+1)$를 계산한다. 합의 프로토콜은 열대 행렬 $P\in\mathbb{R}^{n\times n}$(각 열이 1로 합해지는 행렬)와 각 노드의 out‑degree 정보만을 사용한다. 프로토콜은 $T(k)=\lceil c\log k\rceil$ 번의 내부 반복을 수행해, 최종 추정치들이 사전에 지정한 허용오차 $\varepsilon$ 이하로 서로 가까워지도록 설계되었다.
알고리즘의 수학적 분석은 두 가지 가정에 따라 전개된다.
1. **강한 볼록성 + Lipschitz 연속**: 전체 목적함수 $f$가 $\sigma$‑강한 볼록성 및 $L$‑Lipschitz 연속성을 만족한다면, Lyapunov 함수 $V(k)=\max_i\|x_i(k)-x^\star\|^2$에 대해 $V(k+1)\le\rho V(k)$ ($0<\rho<1$)를 보인다. 이는 전역 R‑선형 수렴률을 의미한다.
2. **개별 볼록성 + Lipschitz 연속**: 각 $f_i$가 단순히 볼록하고 $L$‑Lipschitz 연속일 경우, 목표 함수값 오차 $f(\bar x(k))-f^\star$가 Q‑선형 수렴을 보이며, $\varepsilon$‑의존 상수 $O(\varepsilon)$에 도달하면 더 이상 감소하지 않는다. 여기서 $\bar x(k)=\frac{1}{n}\sum_i x_i(k)$는 평균 추정치이다.
통신 복잡도 측면에서, 기존 DGD, Push‑Sum, Row‑Column Stochastic 기반 방법은 매 반복마다 $O(1)$개의 통신 라운드만 필요하지만, Gradient‑Consensus는 합의 단계에서 $O(\log k)$번의 내부 라운드를 수행한다. 따라서 전체 통신 비용은 $O(k\log k)$가 된다. 저자들은 이 추가 비용이 합의 정확도와 수렴 속도 향상으로 충분히 보상된다고 주장한다.
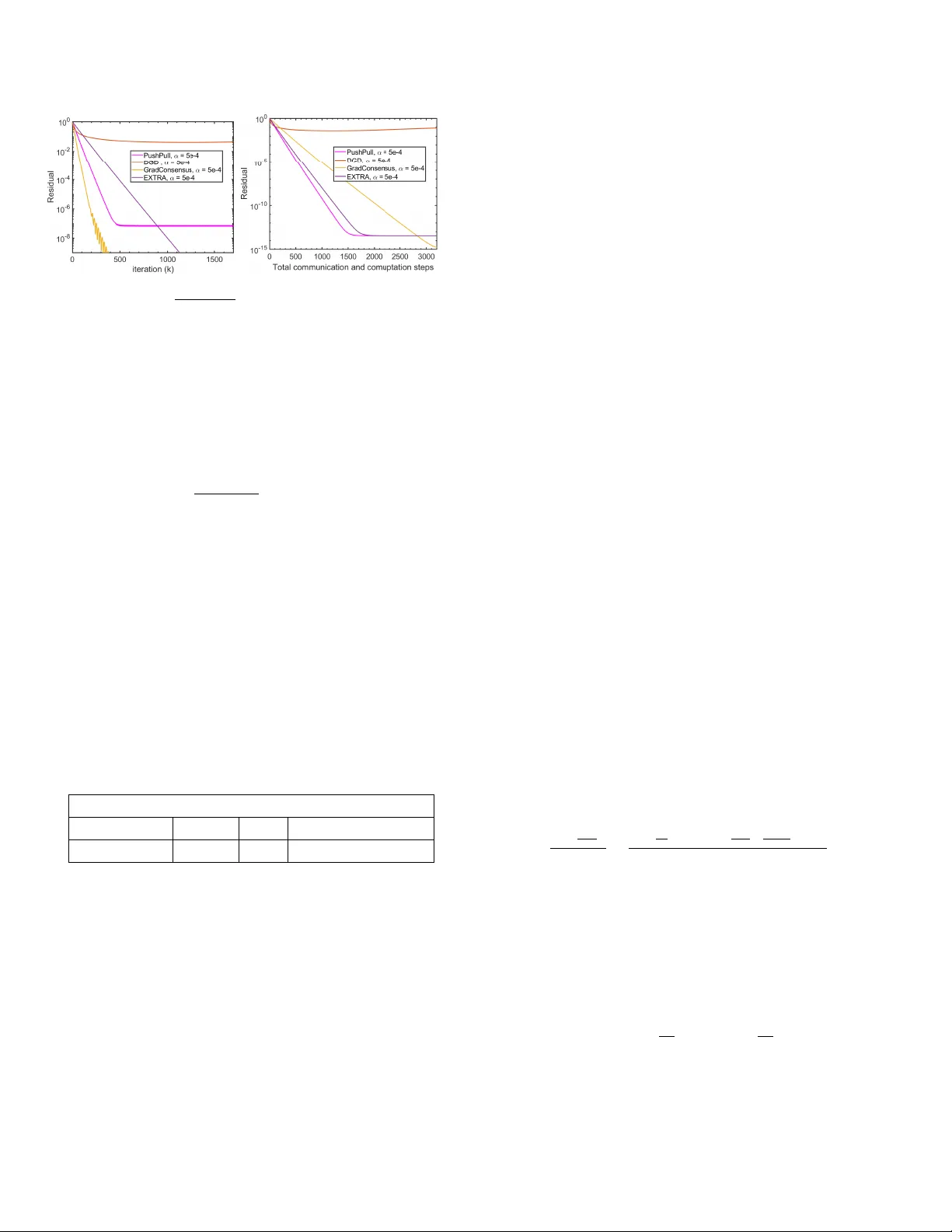
실험에서는 분산 로지스틱 회귀 문제를 설정하고, 기존 알고리즘(Distributed Gradient Descent, Subgradient‑Push, Row‑Column Stochastic)과 비교하였다. 실험 결과는 다음과 같다.
- Gradient‑Consensus는 동일한 최적화 정확도에 도달하기 위해 필요한 그래디언트 평가 횟수가 약 30‑40% 감소하였다.
- 중간 반복 단계에서도 모든 에이전트의 추정치 차이가 $\varepsilon$ 이하로 유지되어, 실시간 제어에 필요한 즉각적인 합의를 제공한다.
- 합의 오차가 큰 기존 알고리즘은 최적화 과정 중에 일시적으로 큰 비용 오차를 발생시켰으나, Gradient‑Consensus는 이러한 현상이 거의 관찰되지 않았다.
논문의 주요 기여는 다음과 같다.
1. **Consensus Constraint Violation** 문제를 명시적으로 정의하고, 기존 알고리즘에서 발생하는 불일치를 실험적으로 보여준다.
2. **Optimize‑then‑agree 프레임워크**를 제안하여 최적화와 합의를 분리함으로써, 허용오차 $\varepsilon$에 따라 합의 정확도를 사전에 제어할 수 있다.
3. **Gradient‑Consensus 알고리즘**을 제시하고, 방향성 그래프에서도 열대 행렬만으로 구현 가능하도록 설계하였다.
4. **수렴 이론**을 두 단계(강한 볼록성, 일반 볼록성)로 구분하여 R‑선형 및 Q‑선형 수렴률을 각각 증명하였다.
5. **통신 복잡도 분석**을 통해 기존 $O(k)$ 대비 $O(k\log k)$의 비용 증가가 수렴 속도와 합의 정확도 향상으로 정당화됨을 보였다.
6. **실험적 검증**을 통해 로지스틱 회귀 문제에서 그래디언트 계산 비용 절감 및 합의 정확도 유지 효과를 입증하였다.
결론적으로, Gradient‑Consensus는 방향성 그래프 기반 분산 최적화에 있어 실시간 합의가 필수적인 응용 분야에 적합한 강력한 도구이며, 기존 방법이 갖는 이론적·실용적 한계를 효과적으로 극복한다는 점에서 학술적·산업적 가치를 동시에 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기