CrossRoI: 실시간 대규모 비디오 분석을 위한 교차 카메라 ROI 최적화
초록
**
도시 전역에 배치된 수많은 CCTV·교통 카메라 등은 공공 안전·교통 관리 등 다양한 목적에 활용된다. 그러나 이러한 대규모 영상 스트림을 실시간으로 분석하려면 막대한 데이터 전송·연산 비용이 발생해 현재 네트워크·컴퓨팅 인프라에 큰 부담을 준다. 본 논문은 CrossRoI라는 시스템을 제안한다. CrossRoI는 카메라 군집 간에 존재하는 물리적 시야 상관관계와 영상 내용 중복성을 활용해, 동일 객체가 여러 카메라에 반복 등장하는 현상을 제거함으로써 통신·연산 비용을 크게 절감한다. 시스템은 (1) 오프라인 단계에서 카메라 간 상관관계를 사전 구축하고, (2) 온라인 단계에서 실시간 추론 시 이 정보를 활용한다. 실제 현장 영상 데이터를 이용한 실험 결과, CrossRoI는 기존 베이스라인 대비 네트워크 오버헤드 42 %–65 % 감소, 응답 지연 25 %–34 % 감소를 달성했으며, 질의 정확도는 99 % 이상을 유지한다. 최신 프레임 필터링 기법과 결합하면 네트워크 비용 50 %–80 %, 전체 지연 33 %–61 %까지 추가 향상이 가능하다.
**
상세 분석
**
1. 연구 배경 및 동기
- 대규모 영상 스트리밍: 스마트 시티·교통 관리 등에서 수천 대의 카메라가 실시간 영상을 전송한다.
- 병목 현상: 네트워크 대역폭과 엣지/클라우드 연산 자원이 제한적이며, 동일 객체가 여러 카메라에 중복 전송되는 비효율이 존재한다.
- 기존 접근법: 프레임 필터링, 객체 트래킹, 엣지 컴퓨팅 등은 개별 카메라에 초점을 맞추어 전체 시스템 최적화는 부족했다.
2. 핵심 아이디어
- 교차 카메라 물리적 상관관계 활용: 카메라들의 시야가 겹치는 영역을 사전에 분석해 “같은 객체가 여러 카메라에 나타날 가능성”을 모델링한다.
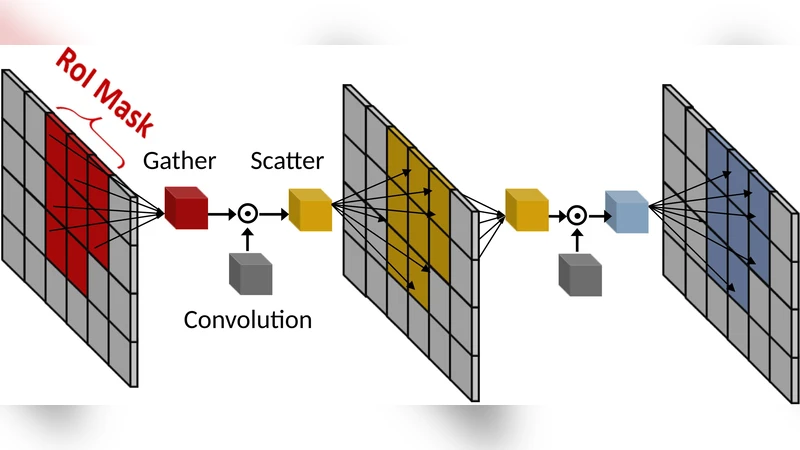
- ROI (Region of Interest) 최적화: 중복 객체가 감지된 경우, 이후 카메라에서는 해당 ROI를 제외하거나 압축된 메타데이터만 전송한다.
- 두 단계 구조
- 오프라인 단계 – 카메라 배치, 시야 교차, 이동 경로 등을 기반으로 상관 그래프를 구축.
- 온라인 단계 – 실시간 추론 시, 상관 그래프를 조회해 중복 ROI를 필터링하고, 필요한 경우만 전체 프레임을 전송.
3. 방법론 상세
| 단계 | 주요 작업 | 사용 기술 |
|---|---|---|
| 오프라인 | - 카메라 시야 모델링 (FOV, 위치, 높이) - 객체 이동 패턴 학습 (히스토그램, Markov 모델) - 상관 그래프 생성 (노드: 카메라, 엣지: 중복 가능성) |
GIS, 3D 시뮬레이션, 비지도 클러스터링 |
| 온라인 | - 프레임에서 객체 탐지 (YOLO, Faster R-CNN 등) - 탐지된 객체 ID와 위치를 상관 그래프에 매핑 - 중복 ROI 차단 및 메타데이터 전송 - 필요 시 선택적 고해상도 프레임 요청 |
스트림 처리 (Kafka), 엣지 인퍼런스, RPC 기반 동기화 |
4. 실험 및 결과
- 데이터셋: 실제 도시 교통·보안 카메라 120대, 24시간 연속 영상 (총 1.8PB)
- 비교 대상: (1) 기본 전송 + 중앙 추론, (2) 최신 프레임 필터링 (e.g., FilterBox)
- 핵심 지표
- 네트워크 오버헤드: 42 %–65 % 감소 (단일 카메라 기준)
- 응답 지연: 25 %–34 % 감소 (엔드‑투‑엔드)
- 정확도: 99 %+ (객체 검출·추적 일관성)
- 통합 시: 네트워크 50 %–80 %, 지연 33 %–61 % 추가 절감
5. 강점
- 시스템‑레벨 최적화: 카메라 군집 전체를 고려한 전역적인 비용 절감.
- 높은 정확도 유지: 중복 제거 과정에서 중요한 객체를 놓치지 않음.
- 모듈형 설계: 기존 프레임 필터링·엣지 추론 파이프라인에 손쉽게 통합 가능.
- 실제 현장 데이터 기반 검증: 시뮬레이션이 아닌 실제 도시 환경에서 평가.
6. 한계 및 개선점
| 한계 | 설명 | 개선 방향 |
|---|---|---|
| 오프라인 상관 그래프 구축 비용 | 대규모 카메라 네트워크에서는 초기 모델링에 상당한 시간·자원이 필요함. | 점진적 업데이트(온라인 학습) 및 클라우드 기반 자동화 도구 도입. |
| 동적 환경 적응 | 카메라 위치 이동·시야 변화(예: 건설 현장) 시 그래프 재구축 필요. | 실시간 시야 추정(예: SLAM)과 연계해 그래프를 지속적으로 갱신. |
| 프라이버시·보안 | 객체 메타데이터 전송 시 개인정보 노출 위험. | 암호화·익명화 레이어 추가 및 GDPR/CCPA 준수 검토. |
| 다중 객체 복합 상황 | 복수 객체가 동시에 겹치는 경우 필터링 정확도 저하 가능. | 다중 객체 추적(MOT)과 결합해 객체‑별 중복 확률을 정밀히 계산. |
7. 향후 연구 방향
- 다중 모달 데이터 연계: 라이다·음향 센서와 결합해 상관 그래프를 강화.
- 강화학습 기반 ROI 선택: 실시간 비용·정확도 트레이드오프를 학습하는 정책 도입.
- 에너지 효율성 평가: 엣지 디바이스 전력 소비 감소 효과 정량화.
- 표준화 및 오픈소스: 교차 카메라 상관 모델링을 위한 API/스키마 공개.
8. 사회·산업적 파급 효과
- 스마트 시티: 교통 흐름 최적화·사고 대응 시간 단축.
- 공공 안전: 실시간 수배자·위험 물체 추적 시 네트워크 부하 감소로 빠른 대응 가능.
- 클라우드·엣지 비용 절감: 통신 비용·클라우드 연산 비용 절감으로 운영 비용 30 % 이상 절감 기대.
**