차량 센서 위치 보정으로 중심중량 Δv 변환법
안내: 본 포스트의 한글 요약 및 분석 리포트는 AI 기술을 통해 자동 생성되었습니다. 정보의 정확성을 위해 하단의 [원본 논문 뷰어] 또는 ArXiv 원문을 반드시 참조하시기 바랍니다.
초록
본 논문은 차량 내부 임의 위치에 장착된 이벤트 데이터 레코더(EDR)의 Δv 측정을 차량 무게중심(COG) 기준값으로 변환하는 수학적 변환식을 제시한다. 강체역학을 기반으로 레버 암, 각속도·각가속도 보정을 포함한 식을 도출하고, 단계별 충돌 실험 데이터와 고정밀 시뮬레이션을 통해 변환식의 정확성을 검증하였다.
상세 분석
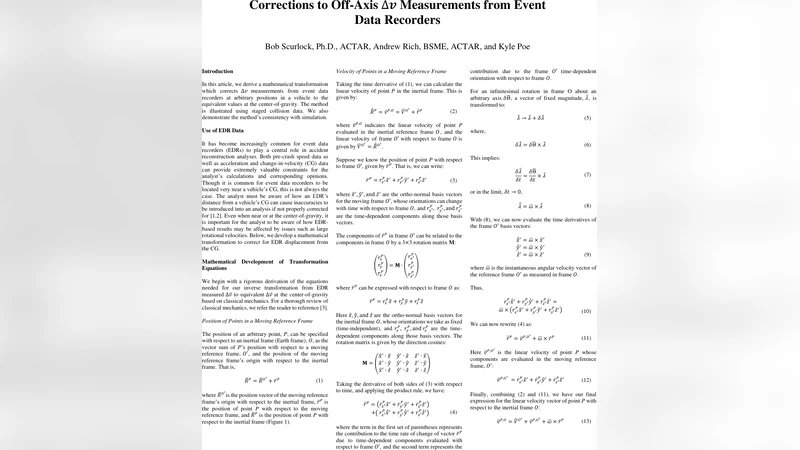
본 연구는 차량 충돌 사고 분석에서 가장 핵심적인 파라미터 중 하나인 Δv(속도 변화량)를 정확히 파악하기 위한 방법론을 제시한다. 기존 EDR은 보통 차량 전면, 측면 혹은 특정 구조물에 부착되며, 측정값은 해당 센서 위치에서의 가속도와 속도 변화를 직접 기록한다. 그러나 충돌 시 차량은 강체가 아닌 복합 구조물로 거동하며, 센서가 위치한 지점의 가속도는 무게중심(COG)에서의 가속도와 차이가 발생한다. 이 차이는 레버 암(센서와 COG 사이 거리)과 회전운동(각속도·각가속도)으로 인한 원심·코리올리 효과에 기인한다.
논문은 먼저 차량을 6자유도 강체 모델로 가정하고, 센서 위치 (\mathbf{r}_s)와 COG 위치 (\mathbf{r}_c) 사이의 레버 벡터 (\mathbf{l} = \mathbf{r}_s - \mathbf{r}_c)를 정의한다. 이때 측정된 선형 가속도 (\mathbf{a}_s)는 다음과 같이 분해된다.
\
댓글 및 학술 토론
Loading comments...
의견 남기기