제한 기간 배리어 함수 기반 제약 학습으로 안전한 제어 구현
본 논문은 무한 시간 동안의 안전 보장이 어려운 경우를 위해, 유한 시간 T 내에만 제약을 만족하는 “제한 기간 안전” 개념을 도입한다. 값 함수 학습을 이용해 제한 기간 제어 배리어 함수(LDCBF)를 구성하고, 이를 QP 기반 실시간 제어에 적용한다. 로봇 군집의 배터리 충전 행동과 카트‑폴 과제의 정책 전이 실험을 통해 LDCBF의 실용성을 검증한다.
저자: Motoya Ohnishi, Gennaro Notomista, Masashi Sugiyama
본 논문은 무인 시스템이 복잡하고 예측 불가능한 환경에서 장시간 운용될 때, 최적성보다 적응성·안전성이 우선시되는 현실적 요구를 반영한다. 기존 제어 이론에서 무한 시간 동안의 전방 불변성을 보장하는 제어 배리어 함수(CBF)는 모든 상황에서 존재하지 않을 수 있다는 점을 지적하고, 대신 유한 시간 T 내에만 제약을 만족하면 충분한 경우가 많다는 관찰에서 출발한다. 이를 “제한 기간 안전(limited‑duration safety)”이라 정의하고, 해당 개념을 수학적으로 정형화한다.
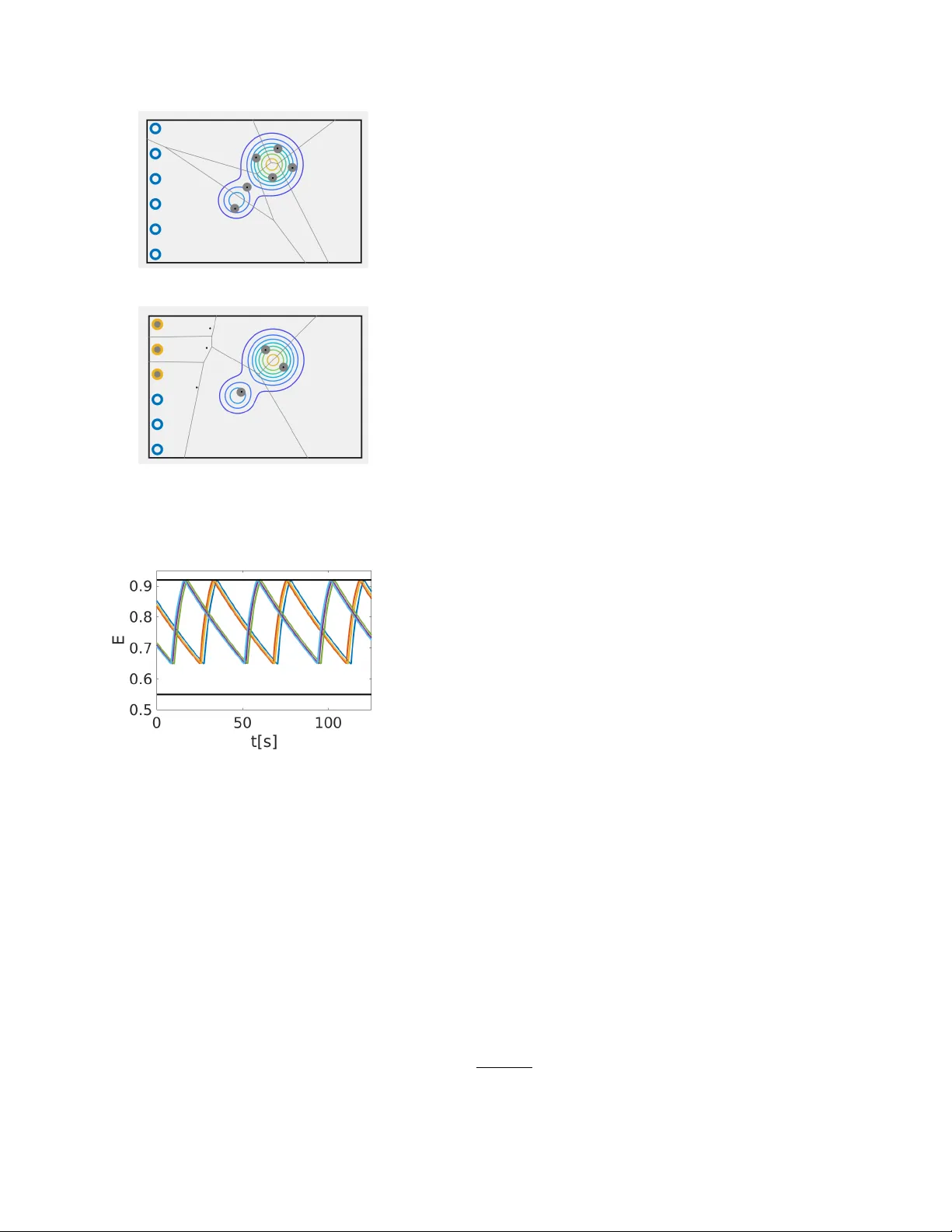
먼저, 시스템 동역학 dx/dt = f(x) + g(x)u 와 상태 집합 O⊂D, 초기 집합 C_T^{LD}⊂O 를 설정한다. 제한 기간 제어 배리어 함수(LDCBF) B_{LD}:D→ℝ_{\ge0} 는 C¹ 함수이며, 다음 두 조건을 만족한다. (i) O⊂int(X) , (ii) 모든 x∈O 에 대해 inf_{u∈U}
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기