데이터 기반 희소 피부 자극으로 인간 사회적 터치 전달
초록
**
본 연구는 압력 센서가 부착된 팔 착용형 장치를 이용해 6가지 사회적 의미를 담은 자연스러운 터치 데이터를 수집하고, 이를 8개의 고정된 음성코일 액추에이터에 매핑하는 알고리즘을 개발하였다. 희소한 압력 자극만으로도 참가자들이 45%의 정확도로 사회적 의미를 구분할 수 있음을 보이며, 인간‑인간 직접 접촉(57%)에 근접함을 입증하였다. 데이터셋과 코드가 공개되어 향후 원격 사회적 촉감 인터페이스 연구에 활용될 수 있다.
**
상세 분석
**
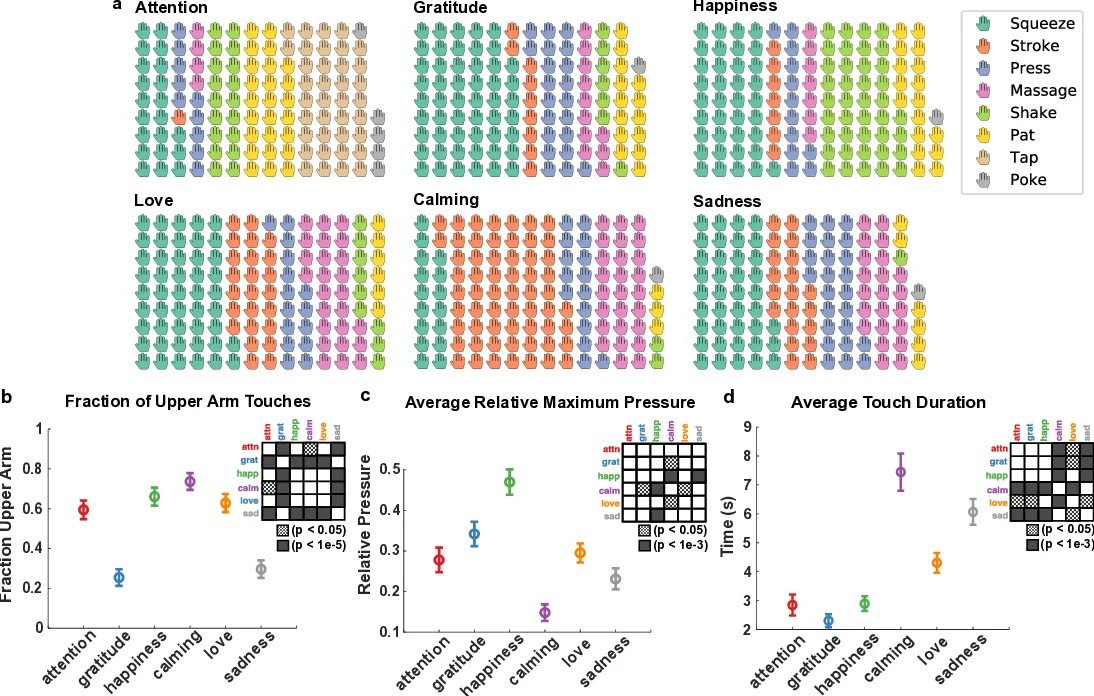
이 논문은 ‘희소(sparse) 피부 자극’이라는 새로운 패러다임을 제시한다. 기존 연구들은 진동, 열, 공기 제트 등 단일 물리량을 이용하거나, 연속적인 스키닝(continuous skin) 장치를 사용해 제한된 제스처(악수, 포옹 등)만을 재현하려 했다. 그러나 인간의 사회적 터치는 압력, 지속 시간, 위치, 움직임 등 다차원적인 신호가 복합적으로 얽혀 있다. 저자들은 이러한 복합성을 보존하면서도 하드웨어 복잡성을 크게 낮추기 위해, 1 in ² 해상도의 부드러운 압력 센서 슬리브를 착용한 피험자에게 자연스러운 터치를 유도하고, 20쌍(40명)의 친밀한 관계(친구·연인)에서 6가지 시나리오(관심 요구, 감사, 행복, 진정, 사랑, 슬픔)를 기록하였다. 총 661개의 터치 인스턴스를 확보하고, 각 인스턴스를 ‘두드림’, ‘쓰다듬기’, ‘흔들기’ 등 기존 연구에서 정의된 제스처로 라벨링했다.
데이터‑드리븐 매핑 알고리즘은 다중 객체 추적 기법을 활용해 압력이 높고 지속적인 접촉 구간을 자동으로 추출한다. 이후 최적화 과정을 통해 전체 팔면적 중 8개의 고정된 위치(각 37~50 mm 간격)를 선정하고, 각 위치에 1 DOF 음성코일 액추에이터를 배치한다. 이 액추에이터는 저압(≤2.96 psi)과 저해상도(20 Hz) 신호만을 전달하지만, 인간의 촉각 수용체가 구별 가능한 최소 간격을 만족한다는 점에서 설계가 정교하다.
사용자 실험에서는 사전 학습 없이 단순히 ‘느껴지는’ 압력 패턴만을 기반으로 시나리오를 추론하도록 하였으며, 평균 45%의 정확도를 기록했다. 이는 인간‑인간 직접 접촉 실험(57%)과 비교했을 때 차이가 크지 않으며, 특히 ‘사랑’·‘슬픔’과 같은 감정적 의미를 어느 정도 전달할 수 있음을 시사한다. 다만 정확도가 50% 이하인 점은 희소 액추에이터 수와 자극 강도의 제한, 그리고 개인별 촉각 민감도 차이 등을 고려할 때 아직 개선 여지가 있음을 보여준다.
기술적 기여는 크게 세 가지이다. 첫째, 자연스러운 사회적 터치를 기록한 대규모 데이터셋을 공개함으로써 후속 연구의 기반을 마련했다. 둘째, 압력 데이터 → 희소 액추에이터 매핑이라는 전처리·최적화 파이프라인을 구현하고 코드를 제공해 재현성을 확보했다. 셋째, 희소 촉감 인터페이스가 인간의 사회적 의미 인식에 충분히 기여할 수 있음을 실증함으로써, 원격 협업·원격 치료·소셜 로봇 등 다양한 응용 분야에 대한 가능성을 열었다. 향후 연구에서는 액추에이터 수를 동적으로 조절하거나, 온도·진동 등 다중 물리량을 결합한 하이브리드 자극, 개인 맞춤형 매핑 모델을 도입해 인식 정확도를 높이는 방향이 기대된다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기