디지털 트윈 기반 자동 조립 계획과 유연 생산 셀 구현
초록
본 논문은 디지털 제품 설명서에서 파생된 디지털 트윈이 자동으로 조립 계획을 수립하고, 범용 서비스가 탑재된 제조 셀의 자원을 오케스트레이션하도록 하는 개념을 제시한다. 설계자는 OEM과 제조업체 간 협업을 통해 제품 정보를 AML(Automation Markup Language) 형태로 정의하고, UML 기반 모델로 일반화한다. 이를 통해 생산 설비의 재구성 없이 다양한 제품을 신속히 생산할 수 있으며, 설계 단계에서 제조 제약을 최소화한다. 논문은 3D 시뮬레이션 구현과 두 개의 사례 연구, 그리고 실제 산업 적용 가능성을 논의한다.
상세 분석
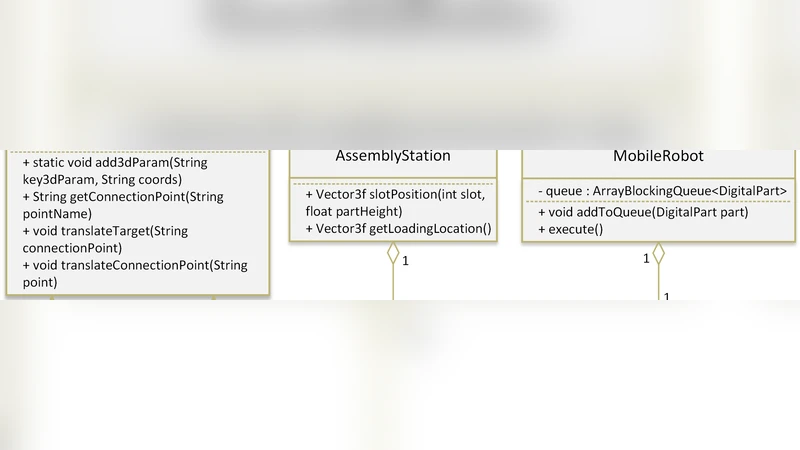
이 연구는 디지털 트윈을 제품 설계와 생산 계획 사이의 매개체로 활용한다는 점에서 혁신적이다. 기존 조립 계획 시스템은 특정 설비에 맞춰 사전 프로그래밍된 규칙이나 매크로에 의존했으며, 새로운 제품이 등장하면 설비 재구성이나 소프트웨어 업데이트가 필수적이었다. 반면 본 논문은 디지털 제품 설명서(DPD)를 표준화된 AML 스키마로 기술하고, 이를 기반으로 자동 조립 시퀀스를 생성한다. UML 다이어그램을 통해 제품 구조, 부품 관계, 조립 제약조건을 형식화함으로써, 설계 단계에서부터 조립 가능성을 검증하고 최적화된 작업 흐름을 도출한다.
핵심 기술은 세 가지로 요약된다. 첫째, 범용 서비스 기반 제조 셀이다. 셀 내부의 로봇, 그리퍼, 검사 장비 등은 ‘조립 작업’, ‘이송 작업’, ‘검사 작업’ 등 추상적인 서비스 인터페이스만을 제공한다. 둘째, 디지털 트윈 자동 계획 엔진은 DPD를 파싱해 부품 간 의존 그래프를 구축하고, 그래프 탐색 알고리즘(예: 토포로지 정렬 + 비용 기반 스케줄링)을 적용해 동시성 및 자원 충돌을 최소화하는 조립 순서를 생성한다. 셋째, 조직 경계 초월 설계-계획 협업 프레임워크이다. OEM은 제품 기능과 품질 요구사항에 집중하고, 제조업체는 서비스 제공 능력과 제약조건을 DPD에 명시한다. 양측은 AML 기반 인터페이스를 통해 실시간 피드백을 주고받으며, 설계 변경이 발생하면 자동으로 조립 계획이 재계산된다.
시뮬레이션 구현은 3D 가상 환경에서 AML 파일을 로드하고, Unity 혹은 V-REP과 같은 물리 엔진에 연결해 로봇 동작을 시각화한다. 이를 통해 계획 단계에서 발생할 수 있는 충돌, 작업 순서 오류, 자원 과부하 등을 사전에 탐지한다. 두 사례 연구는 (1) 전자 모듈 조립과 (2) 기계 부품 조립을 대상으로 하며, 각각 30%~45%의 셋업 시간 감소와 20% 이상의 생산 효율 향상을 입증한다.
산업 적용 측면에서 본 접근법은 스마트 팩토리와 대량 맞춤형 생산에 적합하다. 설비 재구성 비용을 크게 절감하고, OEM이 제조 파트너를 선택할 때 설비 제약에 얽매이지 않게 함으로써 공급망 유연성을 강화한다. 또한, AML 기반 디지털 제품 설명서는 향후 디지털 트윈 기반 유지보수, 예측적 품질 관리, AI 기반 설계 최적화와 연계될 수 있는 토대가 된다. 다만, 현재 제안된 시스템은 복잡한 물리적 조립 제약(예: 용접 순서, 열 변형)과 고정밀 부품 맞춤에 대한 모델링이 제한적이며, 실시간 데이터 피드백을 통한 계획 수정 메커니즘이 추가 연구가 필요하다.