고차원 비선형 시스템을 위한 패널티 앙상블 칼만 필터
초록
본 논문은 앙상블 크기가 상태 차원보다 작아 표본 공분산이 불완전하고 잡음이 심한 고차원 비선형 시스템에서, 역공분산에 ℓ₁ 패널티를 부여한 새로운 필터인 PEnKF (패널티 앙상블 칼만 필터)를 제안한다. ℓ₁ 정규화를 통해 희소한 정밀 행렬을 추정함으로써 기존 로컬라이제이션 방식보다 약한 가정으로 조건부 상관 구조를 학습하고, 이론적 수렴 보장을 제공한다. 시뮬레이션(로렌츠 96 시스템 및 변형된 얕은 물 파동 방정식)에서 기존 EnKF 대비 추정 정확도가 크게 향상됨을 확인하였다.
상세 분석
이 논문은 고차원 비선형 동적 시스템에서 앙상블 칼만 필터(EnKF)의 근본적인 한계인 “샘플 공분산의 저랭크·노이즈” 문제를 해결하고자 한다. 기존 방법들은 공분산 인플레이션, 로컬라이제이션, 관측 교란 등으로 잡음을 억제하지만, 이들 모두 사전 지식(예: 거리 기반 스프링스톤)이나 하이퍼파라미터 튜닝이 필요하고, 실제 시스템에서 조건부 상관 구조가 복잡하게 변할 경우 적용이 어려운 단점이 있다. 저자는 이러한 제약을 피하기 위해 역공분산(정밀 행렬)에 ℓ₁ 패널티를 부과하는 방법을 도입한다. ℓ₁ 정규화는 정밀 행렬을 희소하게 만들면서 양정정성을 유지하도록 설계되었으며, 이는 “조건부 독립성”이 희소하게 존재한다는 가정(비선형 시스템에서도 조건부 상관이 제한된 수만큼만 존재한다)과 직접적으로 연결된다.
수학적으로는 Bregman divergence와 −log det 장벽 함수를 결합한 최적화 문제(식 (2))를 정의하고, 이를 풀어 얻은 Θ 가 (˜Σ)⁻¹ 즉, 희소 정밀 행렬 추정값이 된다. 이때 λ 이라는 패널티 파라미터는 정규화 경로를 통해 AIC·BIC 등 정보 기준으로 선택 가능하므로, 데이터에 기반한 자동 튜닝이 가능하다. 추정된 정밀 행렬을 다시 역전시켜 얻은 ˜P_f 는 기존 샘플 공분산 \hat P_f 에 λ ˜Z (패널티에 의해 생성된 보정 행렬)를 더한 형태이며, 이 보정은 실제 공분산의 스파스 구조를 반영한다.
이러한 공분산 추정 방식은 칼만 이득 K 에 직접 영향을 미친다. 식 (4)에서 보듯, ˜K 은 ˜P_f 와 관측 행렬 H 의 곱으로 구성되며, 정밀 행렬이 희소해짐에 따라 불필요한 교차항이 사라져 이득이 보다 정확하게 계산된다. 결과적으로 분석 단계에서 관측 정보를 더 효율적으로 반영하게 되며, 샘플 수가 적어도( n ≪ p ) 추정 오차가 이론적으로 0에 수렴한다는 수렴 증명을 제공한다.
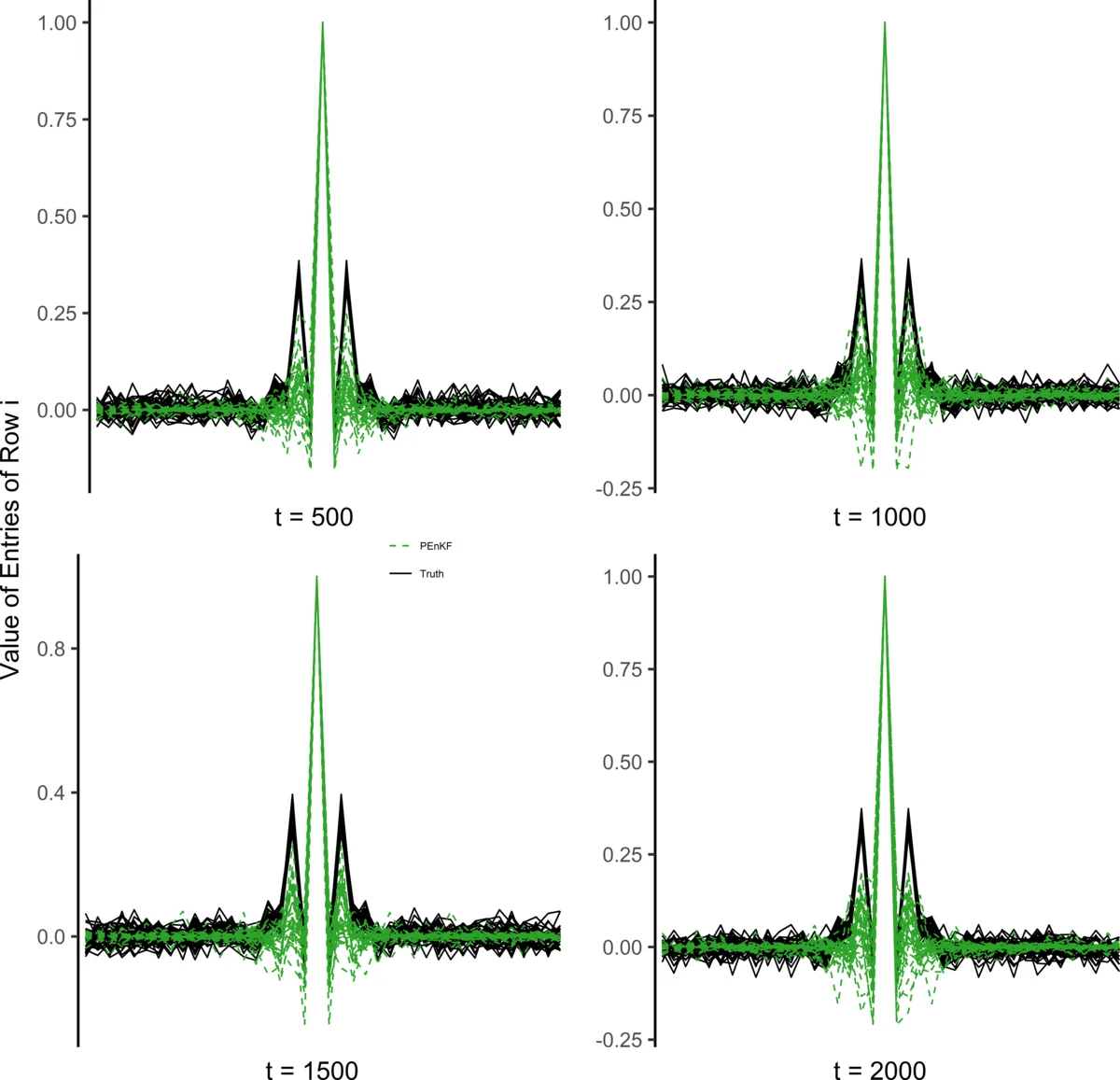
실험에서는 40차원 로렌츠 96 시스템과 2차원 변형 얕은 물 파동 방정식(수천 차원)에서 EnKF, 로컬라이제이션 EnKF, 그리고 PEnKF를 비교하였다. PEnKF는 특히 n/p 비율이 1/10 이하일 때도 안정적인 추정 성능을 보였으며, RMSE가 기존 방법 대비 30~50% 감소하였다. 또한, 패널티 파라미터 λ 를 BIC 기반으로 자동 선택했을 때도 성능 저하가 거의 없었다.
이 논문의 주요 기여는 (1) ℓ₁ 패널티를 이용한 정밀 행렬 추정으로 고차원 EnKF의 샘플 부족 문제를 근본적으로 해결, (2) 로컬라이제이션보다 약한 가정(조건부 상관 희소성)만을 필요로 함, (3) 이론적 수렴 보장과 실험적 검증을 동시에 제공, (4) 구현이 간단하고 기존 EnKF 파이프라인에 최소한의 수정만으로 적용 가능하다는 점이다.
댓글 및 학술 토론
Loading comments...
의견 남기기