자율주행차 안전 검증을 위한 커버리지 기반 테스트 체계적 문헌 고찰
초록
본 논문은 지난 10년간 자율주행차(SAV)의 검증·확인(V&V)과 안전 보증을 위해 제안된 커버리지 기준과 커버리지를 극대화하는 기법들을 체계적으로 정리한다. 시스템적 문헌고찰(SLR) 방법으로 연구들을 분류·분석하고, 현재 연구의 공백과 향후 연구 방향을 제시한다.
상세 분석
본 연구는 자율주행차 안전성 확보를 위한 핵심 수단으로 커버리지 기반 테스트에 초점을 맞추었다. 먼저, SLR 절차에 따라 5개의 데이터베이스(IEEE Xplore, Scopus, Web of Science, ACM DL, Google Scholar)에서 2013‑2023년 사이 발표된 212편의 논문을 수집하고, 중복 제거·제목·초록·키워드 검토를 통해 68편을 최종 선정하였다. 선정 논문은 크게 ‘커버리지 기준 제시’, ‘커버리지 최적화 기법’, ‘실험·사례 연구’, ‘표준·프레임워크 연계’ 네 가지 카테고리로 분류되었다.
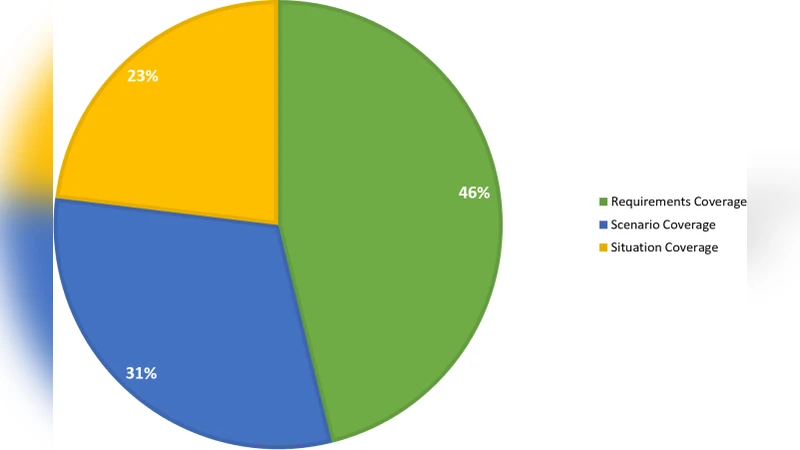
① 커버리지 기준 측면에서는 시나리오 커버리지(주행 상황·교통 흐름), 기능 커버리지(인식·판단·제어 모듈), 코드·구조 커버리지(Branch, MC/DC), 위험도 기반 커버리지(ASIL 등급 연계) 등이 제안되었다. 특히, 시나리오 커버리지는 ‘동적 시나리오 생성’, ‘가상 환경 파라미터 변이’, ‘실제 도로 데이터 기반 클러스터링’ 등으로 구체화되었으며, 위험도 기반 커버리지는 안전 목표와 직접 연결돼 ISO 26262·SOTIF와의 연계성을 강조한다.
② 커버리지 극대화 기법으로는 탐색 기반 테스트(Genetic Algorithm, Particle Swarm), 조합 테스트(다중값 파라미터 조합), 강화학습 기반 시나리오 생성, 베이지안 최적화, 그리고 시뮬레이션·실제 차량 연동 하이브리드 접근법이 주를 이룬다. 특히, 강화학습은 위험 상황을 효율적으로 탐색해 높은 위험도 시나리오를 빠르게 도출하는 데 효과적이라는 평가를 받았다.
③ 실험·사례 연구에서는 CARLA, LGSVL, AirSim 등 오픈소스 시뮬레이터와 실제 테스트 트랙을 결합한 하이브리드 검증이 늘어나고 있다. 그러나 시뮬레이터와 실제 환경 간 차이(시뮬레이션‑리얼 갭)와 대규모 시나리오 관리 비용이 여전히 큰 과제로 남아 있다.
④ 표준·프레임워크 연계 연구는 ISO 26262, ISO/PAS 21448(SOTIF), UNECE R155와 같은 안전 규격에 커버리지 메트릭을 매핑하려는 시도가 눈에 띈다. 하지만 규격별 요구사항의 상충과 메트릭 정의의 일관성 부족이 통합 적용을 저해한다.
연구 격차는 다음과 같다. 첫째, 커버리지 기준 간 상호 연계 모델이 부재해 단일 기준에 의존하는 경향이 있다. 둘째, 대규모 실세계 데이터셋을 활용한 시나리오 커버리지 확장이 제한적이며, 데이터 라벨링 비용이 높다. 셋째, 안전 목표와 테스트 커버리지를 정량적으로 연결하는 수학적 프레임워크가 미비하다. 넷째, 실시간 테스트와 연속적인 안전 평가를 지원하는 자동화 파이프라인이 아직 초기 단계에 머물러 있다.
이러한 공백을 메우기 위해 저자는 (1) 다중‑레벨 커버리지 모델(시나리오‑기능‑코드‑위험도) 구축, (2) 대규모 실세계 주행 로그와 시뮬레이션을 연계한 데이터‑드리븐 시나리오 생성, (3) 안전 목표와 커버리지 메트릭을 연결하는 베이지안 신뢰 모델, (4) CI/CD 환경에 통합 가능한 자동화 테스트 프레임워크 개발을 향후 연구 방향으로 제시한다.