신경망 기반 최적 에너지 셰이핑: 패시비티 제어의 새로운 패러다임
초록
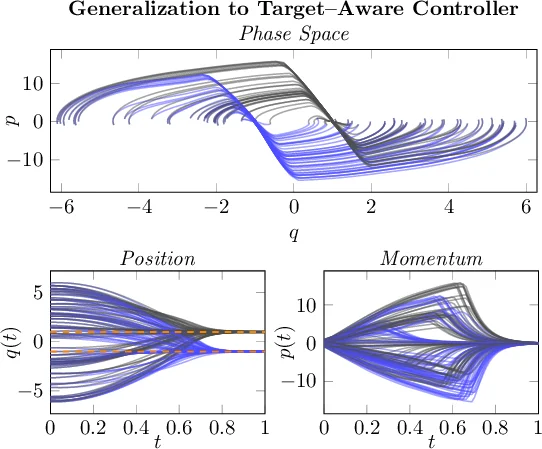
본 논문은 전통적인 패시비티 기반 제어(PBC)의 성능 한계를 극복하기 위해, 에너지 셰이핑 설계를 최적 제어 문제로 재구성한다. 연속심층 학습 프레임워크와 Neural ODE를 활용해 원하는 에너지 함수와 감쇠 행렬을 신경망으로 근사하고, 확률적 경사 하강법으로 최적화한다. 제안 방법은 안정성을 보장하면서도 작업‑특정 비용을 최소화하는 최적 제어기를 자동으로 설계한다. 상태 규제 실험을 통해 기존 quadratic‑potential 기반 PBC 대비 향상된 성능을 입증한다.
상세 분석
이 논문은 포트‑해밀토니언(port‑Hamiltonian) 시스템을 기반으로 한 패시비티 기반 제어(PBC)의 핵심 아이디어를 유지하면서, 설계 자유도를 최적화 문제로 확장한다는 점에서 혁신적이다. 기존 EB‑PBC는 원하는 에너지 함수 (H^*)와 감쇠 행렬 (K)를 임의로 선택하고, 매칭 방정식(4)을 만족시키는 피드백 (\beta(x))를 도출한다. 그러나 실제 설계에서는 보통 2차형 잠재 에너지와 상수 감쇠만을 사용해 성능이 제한된다. 저자들은 비용 함수 (\ell)를 정의하고, 초기 상태 분포에 대한 기대값을 최소화하는 형태의 비선형 프로그램(6)을 제시한다.
핵심 이론적 기여는 두 단계로 나뉜다. 첫째, 매칭 방정식의 PDE 제약을 제거하기 위해 제안된 Proposition 2는 시스템의 제어 가능한 부분공간을 나타내는 매핑 (\Lambda(x))가 존재하면, 원하는 에너지 함수를 기존 해밀토니언에 추가적인 스칼라 함수 (\phi(x_a))만으로 표현할 수 있음을 보인다. 이는 매칭 방정식을 자동으로 만족하는 저차원 서브맨리폴드 (X_a)를 정의함으로써 문제 차원을 크게 축소한다.
둘째, 무한 차원의 함수 공간을 실제 구현 가능한 형태로 변환하기 위해 신경망 파라미터 (\theta)를 도입한다. (\phi_\theta)와 (K_\theta)를 각각 에너지 보정 함수와 상태‑시간 의존 감쇠 행렬로 근사하고, 전체 시스템을 연속심층 모델(Neural ODE)으로 묶어 미분 가능한 동역학을 만든다. 이렇게 하면 기대 비용 (\mathbb{E}_{x_0}
댓글 및 학술 토론
Loading comments...
의견 남기기