딥 모델 예측 제어와 온라인 학습을 통한 복잡 유체 시스템 제어
초록
본 논문은 고차원·비선형·다중 스케일을 갖는 유체 흐름을 실시간으로 제어하기 위해, 저차원 특징을 추출하는 순환 신경망(RNN)을 기반으로 한 딥 모델 예측 제어(DeepMPC) 프레임워크를 제안한다. 제한된 센서 데이터만으로 흐름의 양력·항력과 같은 제어 관련 양을 예측하고, 이를 MPC 최적화에 삽입해 온라인으로 모델을 업데이트한다. 단일 실린더와 3실린더 ‘플루이딕 핀볼’ 사례에서 라그랑지안 추적 성능을 검증하였다.
상세 분석
이 연구는 전통적인 모델 기반 제어가 고차원 유체 시스템에 적용되기 어려운 문제점을 정확히 짚어낸다. 흐름의 전체 상태를 직접 모델링하는 대신, 관측 가능한 저차원 양(양력·항력 등)만을 목표 변수로 설정하고, 이들의 시간 진화를 예측하는 RNN을 설계했다. RNN은 인코더‑디코더 구조를 채택해 과거 관측값과 현재 제어 입력을 딜레이 좌표 형태로 입력받으며, 인코더는 장기 의존성을, 디코더는 예측 단계별 동적 변화를 담당한다. 학습 단계는 (1) 조건부 제한 볼츠만 머신으로 초기 파라미터 설정, (2) 단일 타임스텝 예측 훈련, (3) 전체 예측 호라이즌(N 단계) 학습이라는 3단계 절차를 통해 폭발·소실 그래디언트 문제를 완화한다.
예측 모델 Φ는 MPC 문제(2)에서 제약식으로 사용되며, 목표 궤적(z_ref)과 제어 입력(u)의 비용을 최소화하는 최적화는 BFGS와 같은 2차 최적화 기법으로 해결된다. 여기서 중요한 점은 온라인 학습을 통해 실시간 센서 데이터가 들어올 때마다 RNN 파라미터를 업데이트함으로써 모델 드리프트를 억제하고, 비선형·혼돈 흐름에서도 일정 수준의 추적 정확도를 유지한다는 것이다.
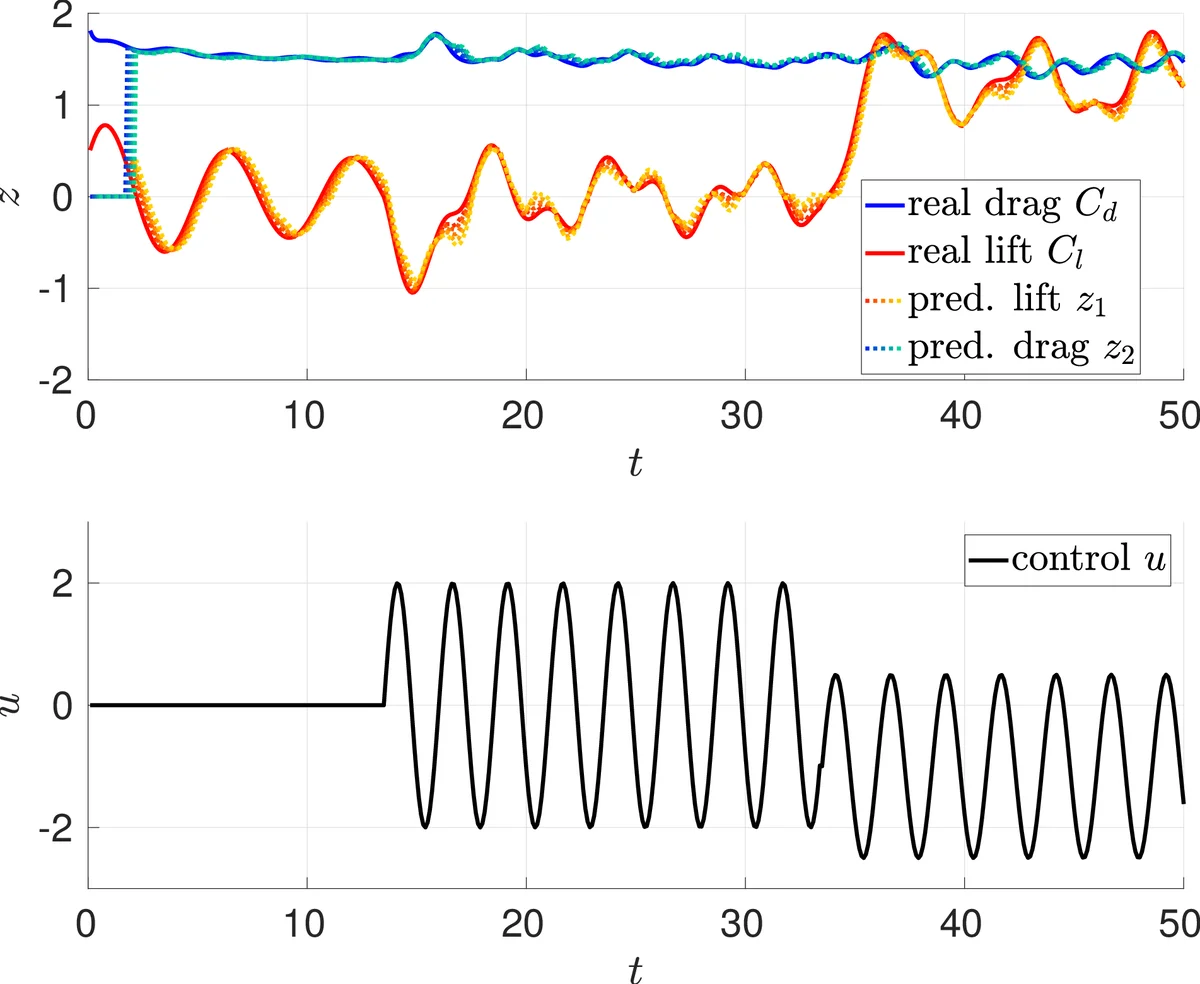
실험에서는 Reynolds 수 100200 범위의 라미나·준라미나·혼돈 흐름을 대상으로, 단일 실린더 회전 제어와 3실린더 배열(플루이딕 핀볼)에서 각 실린더의 양력을 개별적으로 추적하도록 설계하였다. 결과는 예측 호라이즌 N=510, 제어 입력 제한 ±2, 정규화 파라미터 β=0.01 등 실용적인 제약 하에서도 RNN이 5~10 스텝을 정확히 예측하고, MPC가 실시간으로 최적 제어 신호를 생성함을 보여준다. 특히 혼돈 흐름(Re=140,200)에서는 추적 오차가 증가하지만, 여전히 목표 궤적을 따라가는 경향을 보이며, 이는 모델 기반 제어가 고차원 혼돈 시스템에도 적용 가능함을 시사한다.
이 논문의 주요 기여는 (1) 전체 유체장 대신 저차원 관측값만을 이용한 딥러닝 기반 동적 모델링, (2) 온라인 학습을 통한 모델 적응성 확보, (3) 제한된 센서 환경에서도 실시간 MPC 적용 가능성을 입증한 점이다. 향후 연구에서는 센서 노이즈, 더 높은 Reynolds 수, 3차원 난류 흐름 등에 대한 확장과, 물리적 제약(예: 에너지 소비)과 결합한 다목적 최적화가 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기