배터리 예측과 형식 검증을 융합한 자율 로봇 안전성 강화
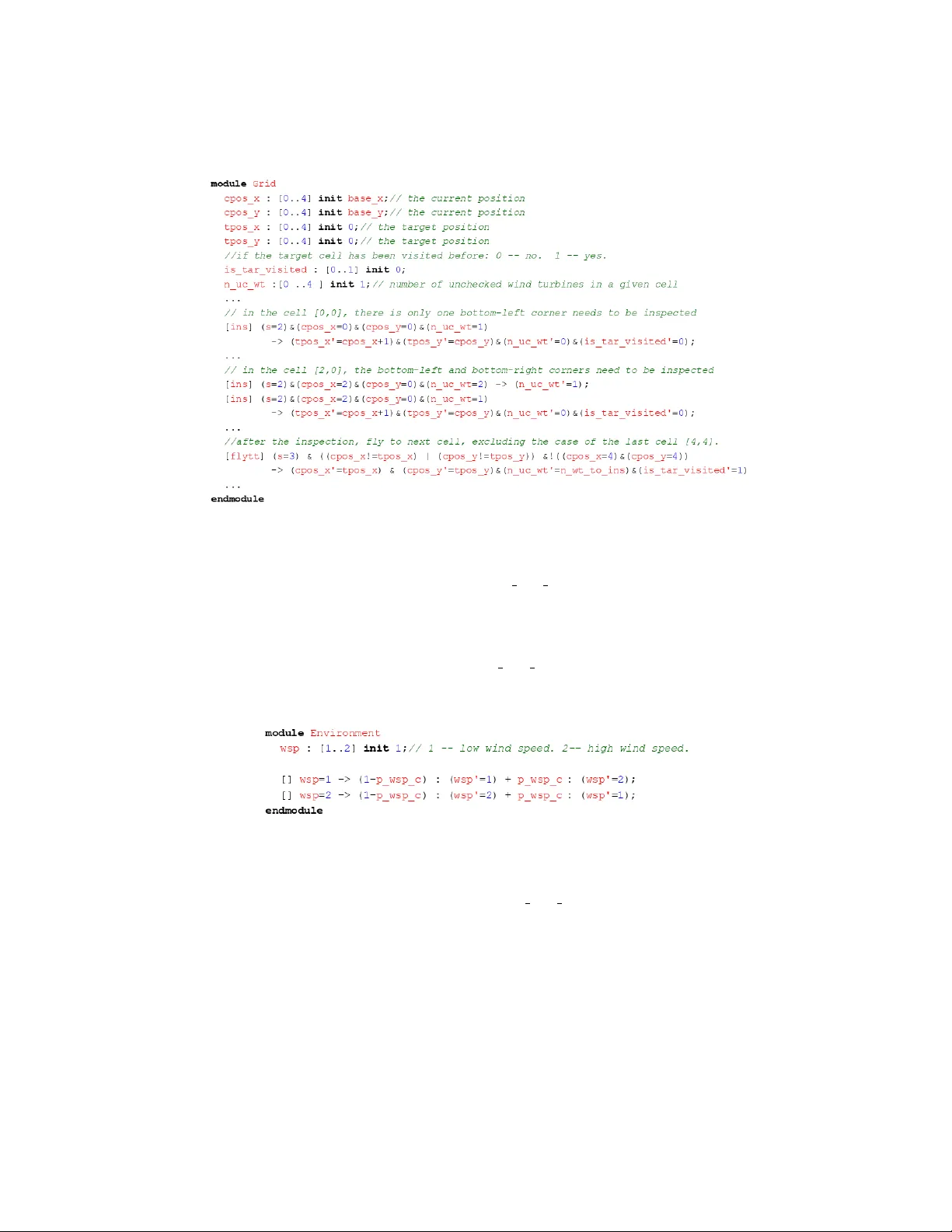
본 논문은 배터리 용량 감소와 SOC에 따른 방전 특성을 정량적으로 모델링하고, 이를 PRISM 기반 확률 모델 검증에 통합한다. 풍력 발전소 점검용 UAV 미션을 사례로, 배터리 상태와 동적 전력 요구가 미션 성공 확률에 미치는 영향을 분석하고, 배터리 PHM(예측·건강관리) 기법과 형식 검증의 연계 방안을 제시한다.
저자: Xingyu Zhao, Matt Osborne, Jenny Lantair
본 논문은 배터리의 물리·화학적 특성이 자율 로봇, 특히 무인 항공기(UAV)의 안전성과 신뢰성에 미치는 영향을 정량적으로 분석하고, 이를 형식 검증 기법에 통합하는 방법을 제시한다. 서론에서는 배터리가 액체 연료와 달리 용량 페이드와 SOC에 따른 비선형 방전 특성을 가지고 있음을 강조하고, 기존 연구들이 에너지 제약을 단순히 고정된 에너지 소비량으로 모델링함으로써 이러한 특성을 간과하고 있음을 비판한다.
배경 섹션에서는 확률 모델 검증(PMC)의 기본 개념을 소개하고, DTMC와 PCTL을 이용해 시스템 행동을 수학적으로 표현하는 방법을 설명한다. 이어 배터리 모델링 파트에서는 전압‑SOC, 전류‑SOC 비선형 관계를 실험 데이터(
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기