도로의 규칙: 자율주행차의 안전성과 진행을 보장하는 새로운 게임 이론
초록
본 논문은 자율주행 차량 간 상호작용에서 안전성과 모든 차량의 진행을 보장하는 새로운 프레임워크를 제안합니다. ‘준-동시 게임’이라는 새로운 게임 패러다임과, 모든 에이전트가 따라야 하는 행동 프로토콜을 정의합니다. 이 프로토콜은 모든 교통 상황에서 안전성을, ‘여유로운’ 교통 상황에서는 모든 차량의 진행을 보장합니다.
상세 분석
이 논문의 핵심 기여는 기존의 동시행동 게임이나 번갈아 턴을 진행하는 게임의 한계를 넘어, 에이전트의 상태(도로 네트워크 상의 위치)에 따라 자연스럽게 선행권이 부여되는 ‘준-동시 게임(Quasi-Simultaneous Game)’ 패러다임을 제안한 점입니다. 이는 실제 운전에서 전방 차량의 행동을 먼저 고려하는 인간의 직관을 모델링한 것입니다.
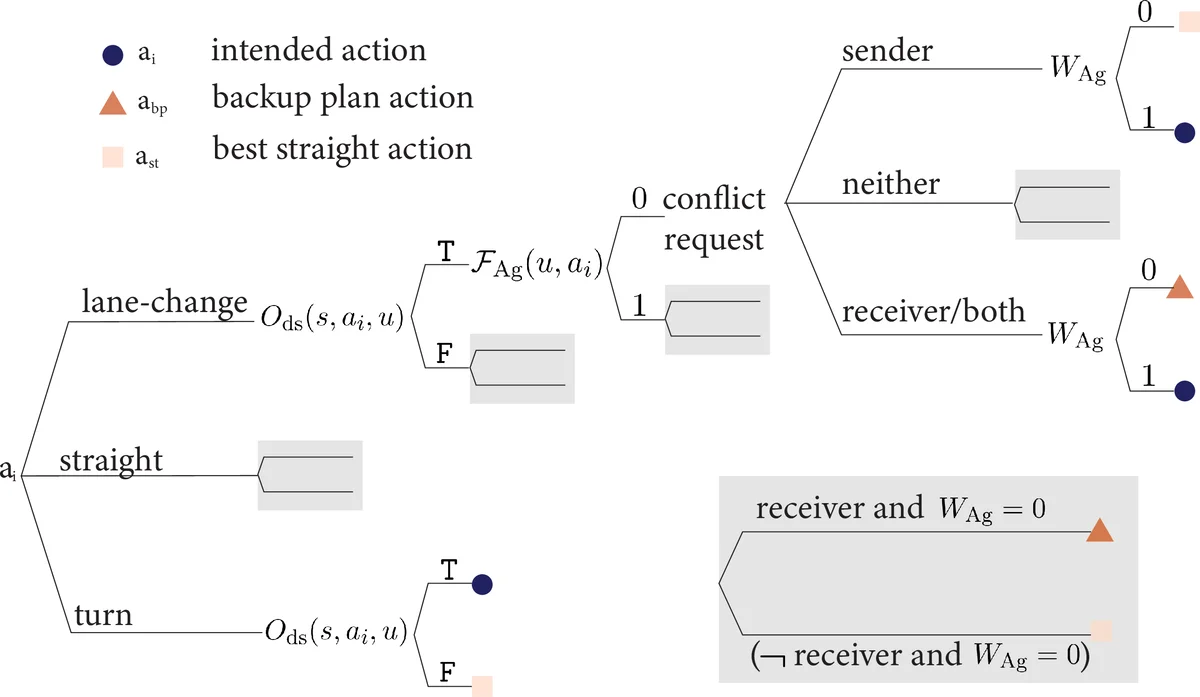
논문에서 제안하는 에이전트 프로토콜은 두 단계로 구성됩니다. 첫째, 각 차량은 ‘행동 프로파일(Behavioral Profile)‘에 따라 의도된 최적 행동을 선택합니다. 이 프로파일은 안전 규칙, 교통 법규, 효율성 등 다양한 명세를 계층적으로 정렬한 것으로, 최소 위반 모션 플래닝의 개념을 구현합니다. 둘째, ‘선행권 할당 알고리즘’과 ‘충돌 클러스터 해결’ 메커니즘을 통해, 동시에 실행 시 충돌이 예상되는 행동들 중 어떤 에이전트가 자신의 의도된 행동을 실행할 권한을 가지는지 결정합니다. 권한을 얻지 못한 에이전트는 차선책(예: 감속)을 실행해야 합니다.
이 프로토콜의 강점은 분산적이고 해석 가능한 규칙 기반 시스템으로, 안전성과 진행에 대한 형식적 증명을 제공할 수 있다는 점입니다. 특히 ‘백업 플랜’ 개념을 통해, 각 에이전트가 최대 제동을 가해 안전하게 정지할 수 있는 능력을 유지한다면 시스템 전체의 안전이 보장됨을 증명합니다.
그러나 한계점도 존재합니다. ‘여유로운’ 교통 조건에서만 진행성(Liveness)이 보장되며, 정체 상황에서의 진행성은 추가 연구가 필요합니다. 또한, 모든 차량이 동일한 클래스(동일한 동역학, 지각 능력)를 가진다는 가정 하에 증명이 이루어졌으며, 이종 차량(오토바이, 트럭, 보행자)이 혼합된 환경으로의 확장은 미래 과제로 남아 있습니다. 시뮬레이션 검증은 개념 증명 수준이며, 복잡한 실제 도로 환경에서의 성능 검증은 필요합니다.
댓글 및 학술 토론
Loading comments...
의견 남기기