비동기 지연과 포화 제어를 갖는 2차 다중 에이전트 합의 연구
본 논문은 포화 비선형성을 가진 2차 다중 에이전트 시스템에서 입력 지연과 통신 지연이 비동기적으로 존재할 때의 합의 문제를 다룬다. 포화 비선형을 선형 요소와 비선형 요소로 분리하고, 비선형 요소를 기술함수(describing function)로 근사한다. 선형 부분에 대해 Lyapunov‑Krasovskii 함수와 주파수 영역(Nyquist) 분석을 적용하여 안정성 조건을 도출하고, 두 방법의 적용 범위와 계산 복잡도를 비교한다. 시뮬레이션…
저자: Venkata Karteek Yanumula, Indrani Kar, Somanath Majhi
본 논문은 포화 액추에이터를 가진 2차 동역학 에이전트들이 비동기적인 입력 지연과 통신 지연을 겪는 상황에서 합의를 달성하기 위한 제어법과 안정성 분석을 제시한다. 서론에서는 다중 에이전트 시스템이 로봇, 무인 항공·수중 차량, 교통 신호 제어, 무선 센서 네트워크 등 다양한 분야에 적용되고 있음을 언급하고, 기존 연구가 주로 선형 시스템이나 동기 지연을 전제로 했던 한계를 지적한다. 특히 포화와 같은 하드 비선형은 실제 시스템에서 흔히 발생하지만, 이를 고려한 2차 시스템의 합의 연구는 아직 미비하다고 설명한다.
문제 설정에서는 n개의 동질 2차 에이전트를 그래프 G=(V,E,A) 로 모델링한다. 각 에이전트 i의 상태는 위치 x_i(t)와 속도 v_i(t)이며, 포화 함수 sat(·) 로 제한된 가속도(속도 변화)를 갖는다. 포화 비선형을 sat(·) = {−Δ, α, Δ} 로 정의하고, 이를 기술함수(N(A)) 로 근사한다. 기술함수는 입력 진폭 A에 대한 등가 이득을 제공하며, 제한 주기의 존재 여부를 판단하는 기준이 된다.
제어법은 네 가지 형태(u_i₁~u_i₄) 로 제시된다. u_i₁과 u_i₃은 속도 피드백을 포함하지 않고 위치 차이에만 의존하는 반면, u_i₂와 u_i₄는 속도 차이까지 고려한다. 또한 u_i₁·u_i₂는 인접 노드의 평균값을 사용해 1‑regular 그래프와 유사한 구조를 만들고, u_i₃·u_i₄는 라플라시안 행렬 D 를 이용해 k‑regular 혹은 spanning tree 형태를 구현한다. 각 제어법은 입력 지연 τ₁(처리 지연)과 통신 지연 τ₂를 비동기적으로 포함한다.
선형화된 시스템은 상태 방정식 ˙X(t)=A₀X(t)+A₁X(t−τ₁)+A₂X(t−τ₂) 로 표현된다. 여기서 A₀, A₁, A₂는 제어법에 따라 달라지며, 행렬 형태는 식 (10)~(13) 에 상세히 제시된다. 오류 변수 Ψ=EX 로 정의하고, Ψ→0이면 모든 에이전트의 위치·속도가 일치함을 보이는 Lemma 3을 통해 합의 정의를 정형화한다.
안정성 분석은 두 갈래로 진행된다. 첫 번째는 Lyapunov‑Krasovskii 함수 기반의 LMI 접근이다. 균형 행렬과 투영 행렬 E 를 이용해 시스템 차원을 2n→2n−2 로 축소하고, P, Q₁, Q₂, Z_i 등 양정 행렬을 포함한 블록 행렬 부등식(식 19‑22)을 구성한다. 이 부등식이 만족되면 선형 부분이 전역적으로 asymptotically stable 하며, 따라서 기술함수에 의해 예측되는 제한 주기가 존재하지 않음이 증명된다. 두 번째는 주파수 영역(Nyquist) 해석이다. 선형 전달함수 G(s)와 기술함수 N(A)를 결합해 (−1/N(A)) 점이 Nyquist 경로 안에 포함되는지를 검사한다. 이 방법은 지연이 일정하고 시스템 차수가 낮을 때 빠르게 판단할 수 있지만, 비선형 근사의 정확도와 다중 고유값에 대한 보수적 가정 때문에 적용 범위가 제한된다.
두 방법의 장단점을 비교한 표와 논의에서는 LMI가 비동기 지연 범위와 그래프 구조에 대해 일반적인 충분조건을 제공하지만 계산 복잡도가 높으며, Nyquist 해석은 계산이 간단하지만 보수적이며 제한된 상황에만 적용 가능함을 강조한다.
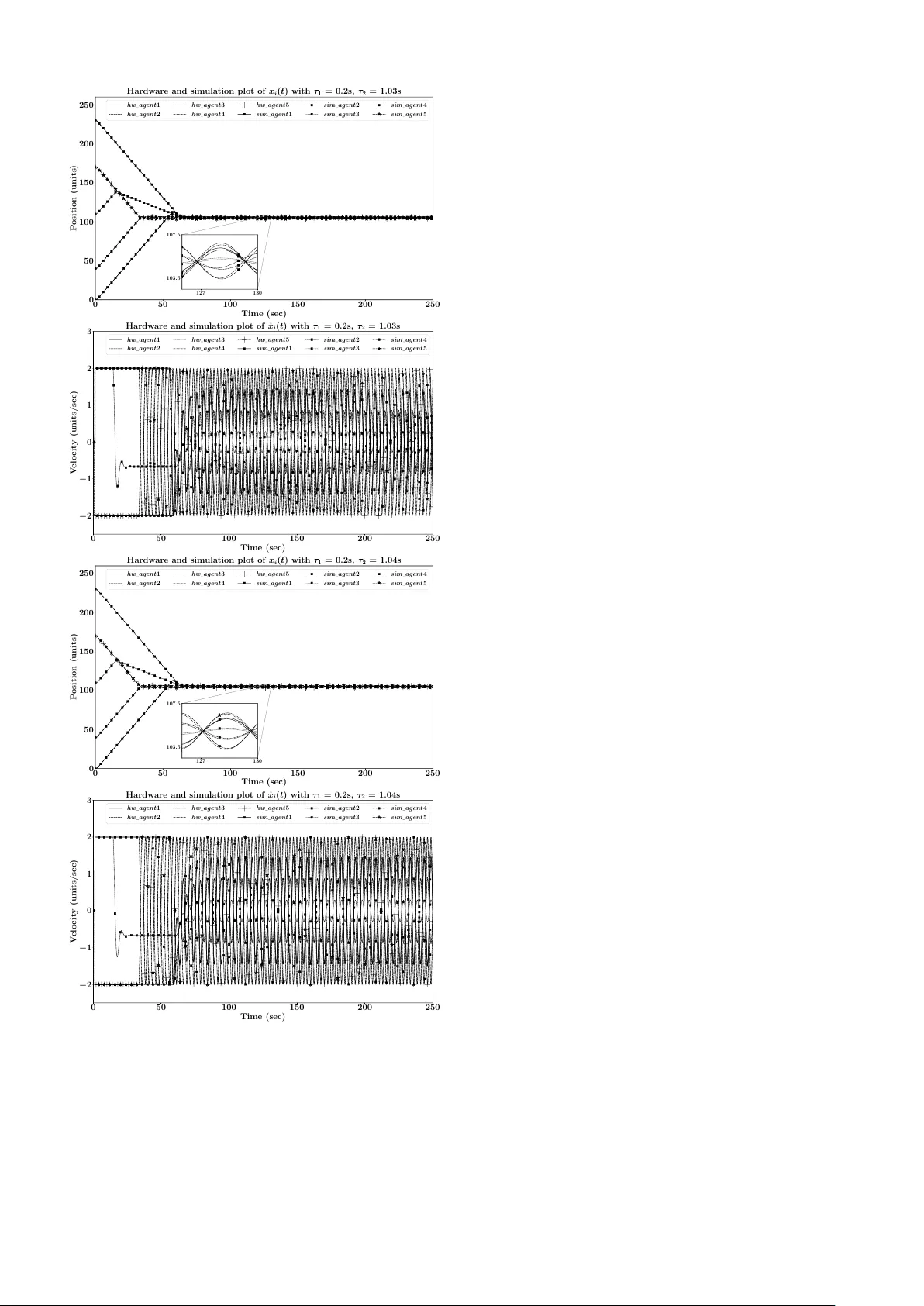
시뮬레이션에서는 4‑agent와 5‑agent 네트워크를 대상으로 각 제어법별 수렴 시간, 제어 입력 크기, 허용 지연 범위를 평가한다. 결과는 u_i₁·u_i₂가 입력 크기가 작아 수렴이 느리지만 지연 허용성이 높으며, u_i₃·u_i₄는 빠른 수렴을 보이지만 지연에 민감함을 보여준다. 하드웨어 실험에서는 Arduino 기반 모바일 로봇에 포화와 비동기 지연을 구현하고, 실시간으로 합의 현상을 관찰한다. 실험 결과는 이론적 LMI 조건과 Nyquist 판정이 모두 실제 시스템에서 일치함을 확인한다.
결론에서는 본 연구가 포화 비선형과 비동기 지연을 동시에 고려한 2차 다중 에이전트 합의 문제에 대한 포괄적인 해석 틀을 제공하고, 설계자가 시스템 요구에 따라 LMI 기반 보수적 설계 혹은 Nyquist 기반 빠른 검증 중 선택할 수 있음을 제시한다. 또한 향후 연구로는 스위칭 토폴로지, 시간 가변 지연, 다중 포화 구간 등을 포함한 확장 가능성을 언급한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기