오픈소스 데이터 기반 무인항공기 충돌 가능성 분석 방법
초록
본 논문은 공개 지리정보 데이터를 활용해 상업·레크리에이션 UAS가 수행하는 점검 임무 중 발생할 수 있는 모든 상대 위치 관계를 분석하는 방법을 제시한다. 기존 기법을 확장하여 16개 지역에 대해 수조 건의 수평 거리 계산을 병렬 처리로 수행함으로써, 잠재적 충돌 시나리오를 정량화한다.
상세 분석
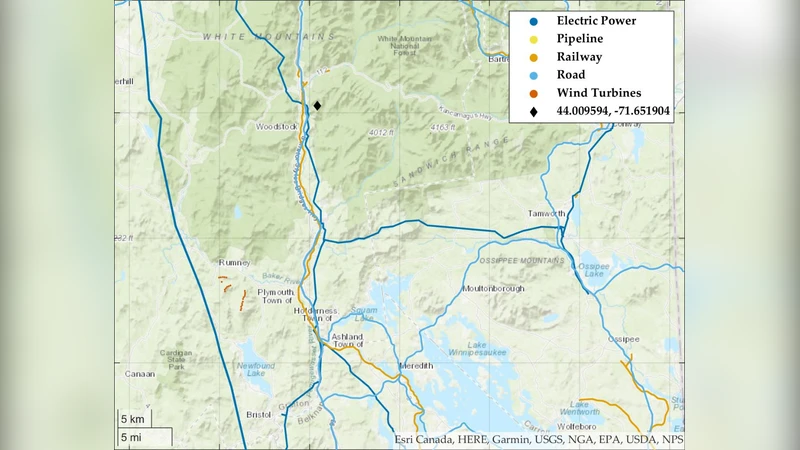
이 연구는 급증하는 무인항공시스템(UAS) 운영이 기존 항공교통에 미치는 영향을 사전에 파악하고, 안전성 검증용 데이터셋을 제공하고자 한다. 핵심은 오픈소스 GIS(Geographic Information System) 데이터—예를 들어 OpenStreetMap, USGS DEM, FAA의 UAS 운영 구역 정보—를 이용해 실제 지형과 인프라를 반영한 ‘대표 비행 경로’를 자동 생성하는 데 있다. 기존 연구에서는 제한된 구역이나 단일 경로에만 적용했으나, 저자들은 이를 일반화하여 점검 임무(전력선, 파이프라인, 태양광 발전소 등)에서 흔히 사용되는 선형·그리드형 비행 패턴을 모델링하였다.
경로 생성 단계에서는 각 점검 대상의 공간적 배치를 파악하고, UAV의 비행 고도, 속도, 촬영 범위 등을 파라미터화한다. 이를 통해 동일 지역 내 여러 UAS가 서로 다른 시작점·목표점을 갖는 경우에도, 시간축을 무시하고 ‘정적’ 상대 위치 관계만을 고려하는 ‘상대 기하학’ 매트릭스를 구축한다. 매트릭스는 두 비행 경로 사이의 모든 가능한 지점 쌍에 대해 수평 거리와 고도 차이를 계산한다.
계산량이 기하급수적으로 증가함에 따라, 저자들은 Python 기반의 Dask와 MPI를 활용한 클라우드 병렬 처리 파이프라인을 설계하였다. 16개 지역(도시·산악·해안 등 다양한 지형) 각각에 대해 수조 건(10¹²) 이상의 거리 쌍을 생성하고, 이를 0.5 m 이하의 거리 구간으로 집계해 위험 구역을 도출했다. 결과는 특정 지역에서 UAV 간 최소 거리 분포가 크게 차이나는 것을 보여주며, 고도 제한, 비행 속도, 임무 시간 창 등이 충돌 위험에 미치는 영향을 정량화한다.
한계점으로는 정적 거리 계산에 시간 동기화가 반영되지 않아 실제 충돌 가능성을 과대/과소 평가할 수 있다는 점, 그리고 오픈소스 데이터의 정확도와 최신성이 지역마다 상이하다는 점을 들 수 있다. 향후 연구에서는 실시간 트래픽 데이터와 시뮬레이션 기반 동적 모델을 결합해 위험 예측 정확도를 높이고, 머신러닝을 이용해 위험 구역을 자동 분류하는 방안을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기