도로망 기반 초고속 위치추정
초록
본 논문은 UAV가 촬영한 영상 속 도로를 기존 도로 벡터 지도와 매칭하여 2차원 투영 변환 하에 포인트 클라우드 등록 문제로 정의하고, 두 교차점과 접선 정보를 이용한 전역 투영 불변 특징(두 교차점 튜플)을 제안한다. 닫힌 형태의 정렬 변환 해를 유도하고, 매칭 후보를 제한하는 필요조건을 도입해 가설‑검증 프레임워크에서 1초 이내에 400 km² 규모 도시 전역을 정확히 로컬라이즈한다.
상세 분석
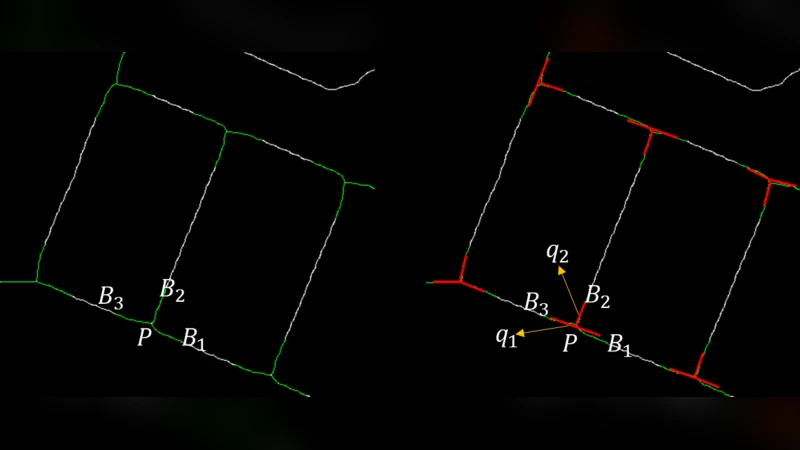
이 연구는 무인항공기(UAV)의 실시간 내비게이션을 위해 영상 기반 위치추정에 도로망 정보를 활용한다는 점에서 의미가 크다. 기존의 이미지‑지도 매칭은 주로 특징점(예: SIFT, ORB)이나 라인 구조에 의존했지만, 도로는 도시 전역에 걸쳐 연속적이고 규칙적인 네트워크를 형성한다는 특성을 이용한다. 논문은 이를 2차원 포인트 클라우드 등록 문제로 전환하고, 투영 변환(Homography) 하에서 불변성을 갖는 특징을 설계한다. 핵심은 ‘두 교차점 튜플(two road intersections tuple)’이다. 각 튜플은 두 개의 교차점 좌표와 해당 교차점에서 도로가 접하는 두 접선 방향을 포함한다. 이러한 구성은 투영 변환에 대해 완전한 불변성을 제공한다는 수학적 증명을 제시한다.
두 튜플 간 매칭이 주어지면, 논문은 선형 방정식 체계를 구축해 H(3×3) 행렬을 닫힌 형태로 직접 계산한다. 이는 RANSAC과 같은 반복적 추정 방법보다 계산량이 크게 감소한다는 장점을 가진다. 또한, 매칭 후보를 사전에 필터링하기 위한 ‘필수 조건(necessary conditions)’을 도출한다. 예를 들어, 두 교차점 사이의 거리 비율과 접선 각도 차이가 일정 범위 내에 있어야 한다는 제약을 두어, 불가능한 조합을 초기 단계에서 배제한다. 이 과정은 후보 수를 수천 배 감소시켜 가설‑검증 단계의 효율을 극대화한다.
실험에서는 400 km² 규모의 도시 영역을 대상으로 1 CPU 코어에서 1초 미만에 최적의 정합을 찾았다. 이는 기존 방법이 수초에서 수십 초를 소요하던 것에 비해 10배 이상 빠른 속도이며, 정밀도 면에서도 평균 위치 오차가 1~2 m 수준으로 실용성을 입증한다. 또한, 다양한 조명·날씨 조건과 복잡한 교차로 구조에서도 견고하게 동작함을 보였다.
이 논문의 기여는 크게 세 가지로 요약할 수 있다. 첫째, 도로망을 2D 포인트 클라우드로 모델링하고 투영 불변 특징을 정의함으로써 기존 이미지‑지도 매칭의 한계를 극복했다. 둘째, 닫힌 형태의 정렬 변환 해와 매칭 후보 감소를 위한 수학적 필요조건을 제시해 연산 복잡도를 크게 낮췄다. 셋째, 실시간 로컬라이제이션을 목표로 한 시스템 구현과 대규모 실험을 통해 실제 UAV 운용에 적용 가능한 성능을 검증했다. 향후 연구에서는 3차원 고도 정보와 결합하거나, 도로 외의 인프라(건물·교량)와의 멀티모달 매칭을 확장함으로써 더욱 복합적인 도시 환경에서도 지속적인 위치 추정을 가능하게 할 수 있을 것이다.
댓글 및 학술 토론
Loading comments...
의견 남기기