움직이는 표적 탐색을 위한 모션 인코딩 입자 군집 최적화 알고리즘
초록
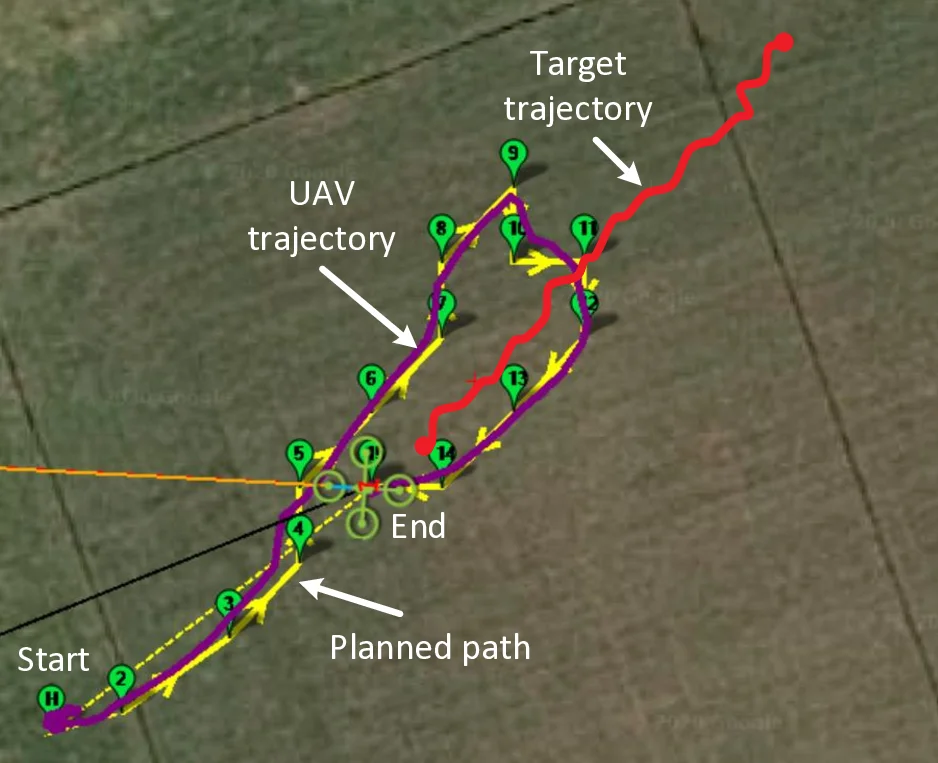
본 연구는 UAV(무인항공기)를 활용한 이동 표적 탐색 문제를 해결하기 위해 모션 인코딩 입자 군집 최적화(MPSO)라는 새로운 알고리즘을 제안합니다. 베이지안 이론을 기반으로 탐색 문제를 최적화 문제로 변환하고, UAV의 이동 궤적을 입자의 운동 경로로 인코딩하여 PSO 알고리즘을 개선했습니다. 시뮬레이션 결과, 제안된 MPSO는 기존 PSO 대비 탐지 성능을 24% 향상시키고 시간 성능을 4.71배 개선했으며, ABC, ACO, GA 등 다른 최신 메타휴리스틱 알고리즘들보다 대부분의 시나리오에서 우수한 성능을 보였습니다. 실제 UAV를 이용한 실험을 통해 실용적 유용성도 입증했습니다.
상세 분석
본 논문의 핵심 기술적 기여는 기존 PSO 알고리즘의 탐색 공간을 UAV의 물리적 운동 공간으로 재정의한 ‘모션 인코딩(Motion-Encoding)’ 개념에 있습니다. 표적 탐색 경로를 그리드 맵의 노드 좌표 집합으로 직접 표현하는 기존 방식과 달리, MPSO는 각 경로 세그먼트를 거리(ρ)와 방향(α)으로 구성된 운동 벡터(u_t)의 시퀀스로 인코딩합니다. 이는 입자 군집의 인지적·사회적 응집성(cognitive and social coherence) 같은 중요한 군집 특성을 보존하면서도, 연속 공간에서의 탐색 능력을 유지하게 해줍니다.
구체적인 동작 과정은 다음과 같습니다: MPSO 알고리즘 내에서 입자의 위치(U_k)는 운동 벡터들의 집합으로 표현되며, 표준 PSO 업데이트 공식(14,15식)에 따라 진화합니다. 평가를 위해 이 연속적인 운동 벡터는 UAV가 한 시간 단계에 이동할 수 있는 8방향 이산 공간으로 매핑됩니다(16-19식). 이를 통해 생성된 실제 궤적(O_k)으로 베이지안 프레임워크에 기반한 목적 함수(10식)를 계산합니다. 이 목적 함수는 제한된 탐색 시간(N) 내에 표적을 처음 발견할 누적 확률(P_t)을 최대화하도록 설계되었으며, 신뢰도 지도(belief map)의 예측(2식)과 업데이트(3식), 센서 모델, 표적의 확률적 운동 모델을 통합합니다.
MPSO의 강점은 문제의 본질인 ‘운동’에 초점을 맞춘 표현 방식에 있습니다. 이는 불연속 노드 점프로 인한 비현실적 경로 생성 문제를 해결하고, 입자들의 운동량 보존을 통해 지역 최댓값에 빠지는 가능성을 줄입니다. 또한, 연속 공간에서의 탐색과 이산 공간에서의 실행을 분리함으로써 알고리즘의 유연성과 실용성을 동시에 확보했습니다. 실험적 검증을 통해 제시된 성능 향상(탐지율 24%, 속도 4.71배)은 단순한 매개변수 튜닝이 아닌, 이러한 근본적인 표현 방식의 변화에서 비롯된 것으로 해석할 수 있습니다. 이는 복잡한 동적 환경에서의 실시간 UAV 경로 계획에 PSO를 효과적으로 적용할 수 있는 새로운 방법론을 제시한다는 점에서 의미가 큽니다.
댓글 및 학술 토론
Loading comments...
의견 남기기