최적 플러킹 연구 개관
초록
본 논문은 로봇 군집(플러킹) 제어에 최적화 기법을 적용한 최신 연구들을 체계적으로 정리한다. 군집 플러킹과 선형 플러킹을 구분하고, 군집 플러킹을 목표 시스템 비용(예: 편차 최소화, 궤적 추적, 기타 목적)별로 반응형과 계획형 접근법으로 나눈다. 선형 플러킹은 에너지 절감 메커니즘에 따라 분류한다. 또한 이웃 필터링·이벤트 기반 계획 등 통신·계산 부담을 줄이는 방법을 소개하고, 향후 연구 방향을 제시한다.
상세 분석
이 논문은 로봇 군집 제어 분야에서 “최적화”라는 관점을 명확히 부각시킨 점이 가장 큰 특징이다. 기존의 플러킹 연구는 주로 레이놀즈의 세 가지 규칙(충돌 회피, 속도 일치, 중심 유지)을 만족시키는 휴리스틱에 초점을 맞추었지만, 본 논문은 이러한 규칙을 비용 함수로 정형화하고, 각 에이전트가 로컬 최적화를 수행하도록 설계한다. 특히 군집 플러킹을 ‘시스템‑레벨 비용 최소화’라는 관점에서 세 가지 카테고리(편차 최소화, 중심 궤적 추적, 기타 목표)로 나누고, 각각을 반응형(실시간 피드백 기반)과 계획형(예측·예비 경로 설계) 접근법으로 구분한다는 체계적인 분류는 연구자들에게 명확한 로드맵을 제공한다.
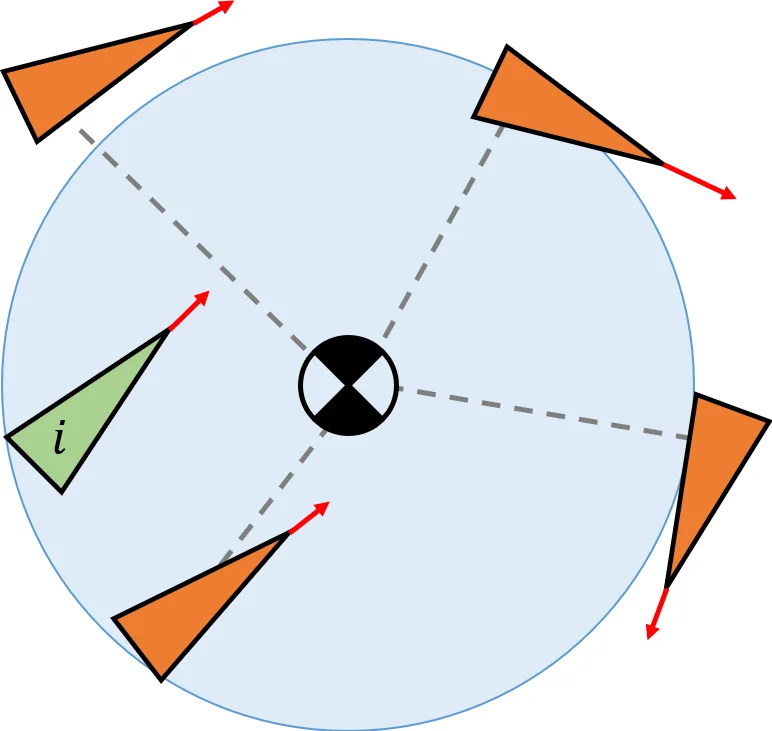
반응형 접근법에서는 강화학습, 메타휴리스틱(예: Pigeon‑Inspired Optimization, Particle Swarm Optimization) 등을 활용해 에이전트가 주변 이웃과의 거리·속도 정보를 실시간으로 이용해 비용을 최소화한다. 이때 비용 함수는 일반적으로 ‘거리 잠재력’ V(‖sᵢⱼ‖)와 속도 일치 항 ‖˙sᵢ‖² 로 구성되며, α‑lattice 형태의 균일 간격을 목표로 한다. 계획형 접근법은 동적 프로그래밍, 모델 예측 제어(MPC) 등을 통해 전체 군집의 궤적을 사전에 최적화한다. 특히 Wang et al. (2018)의 경우, 근접 이웃만을 고려한 ‘각도 대칭’ 이웃 정의를 통해 연결성 손실을 방지하고, 전역 목표(예: 특정 위치로 군집 중심 이동)를 포함한 복합 비용을 최소화한다.
선형 플러킹 파트에서는 에너지 절감 메커니즘(예: 풍동형 비행, 사다리꼴 속도 프로파일) 중심으로 연구를 정리한다. 여기서는 각 에이전트가 개별 에너지 소비를 최소화하면서도 전체 라인 형태를 유지하도록 제어한다. 논문은 또한 사이버‑물리 비용(통신 대역폭, 센서 범위, 연산 부하) 감소를 위한 이웃 필터링과 이벤트‑드리븐 계획 기법을 제시한다. 예를 들어, 일정 시간 간격이 아니라 상태 변화가 감지될 때만 재계산하는 이벤트 기반 MPC는 실시간 구현 가능성을 크게 높인다.
마지막으로, 논문은 다목적 최적화 문제를 파레토 프론티어 분석을 통해 시각화하고, 서로 상충되는 목표(예: 에너지 vs. 응답 속도) 사이의 트레이드오프를 명확히 한다. 이는 설계자가 실제 시스템 요구사항에 맞춰 가중치를 조정할 수 있는 실용적인 도구를 제공한다. 전반적으로 이 논문은 플러킹 제어를 ‘목표‑지향 최적화 문제’로 재정의하고, 이를 구현하기 위한 알고리즘적 선택지를 폭넓게 제시함으로써, 이론과 실험 사이의 격차를 메우는 데 큰 기여를 한다.
댓글 및 학술 토론
Loading comments...
의견 남기기