방향성 그래프에서의 베어링 전용 합의 및 형성 제어
이 논문은 에이전트가 이웃의 상대 방향(베어링)만을 측정할 수 있는 상황에서, 무향 및 방향성 그래프 모두에 대해 합의와 형성 제어를 달성하는 비스무스(비정상) 구배 흐름을 제안한다. 무향 그래프에서는 유한 시간 수렴을, 방향성 그래프에서는 전역적으로 도달 가능한 노드가 존재할 경우 점근적 수렴을 증명한다. 또한 형성 문제에 대해 ‘베어링 지속성(bearing persistence)’이라는 새로운 개념을 도입해 사이클 및 비순환(acyclic)…
저자: Arman Karimian, Roberto Tron
본 논문은 다중 로봇 시스템에서 상대 방향(베어링)만을 측정할 수 있는 센서 환경을 가정하고, 이러한 제한된 정보만으로 합의와 형성 제어를 달성하기 위한 새로운 비스무스(비정상) 구배 흐름을 제시한다. 연구는 크게 네 부분으로 구성된다.
1. **문제 정의 및 사전 지식**
- 에이전트는 1차원 혹은 다차원 공간(d‑dimensional)에서 단일 적분기(single‑integrator) 동역학을 가진다.
- 각 에이전트 i는 이웃 j와의 베어링 u_{ij}= (x_j−x_i)/‖x_j−x_i‖ 를 측정하지만, 거리 d_{ij}=‖x_j−x_i‖ 은 알 수 없다.
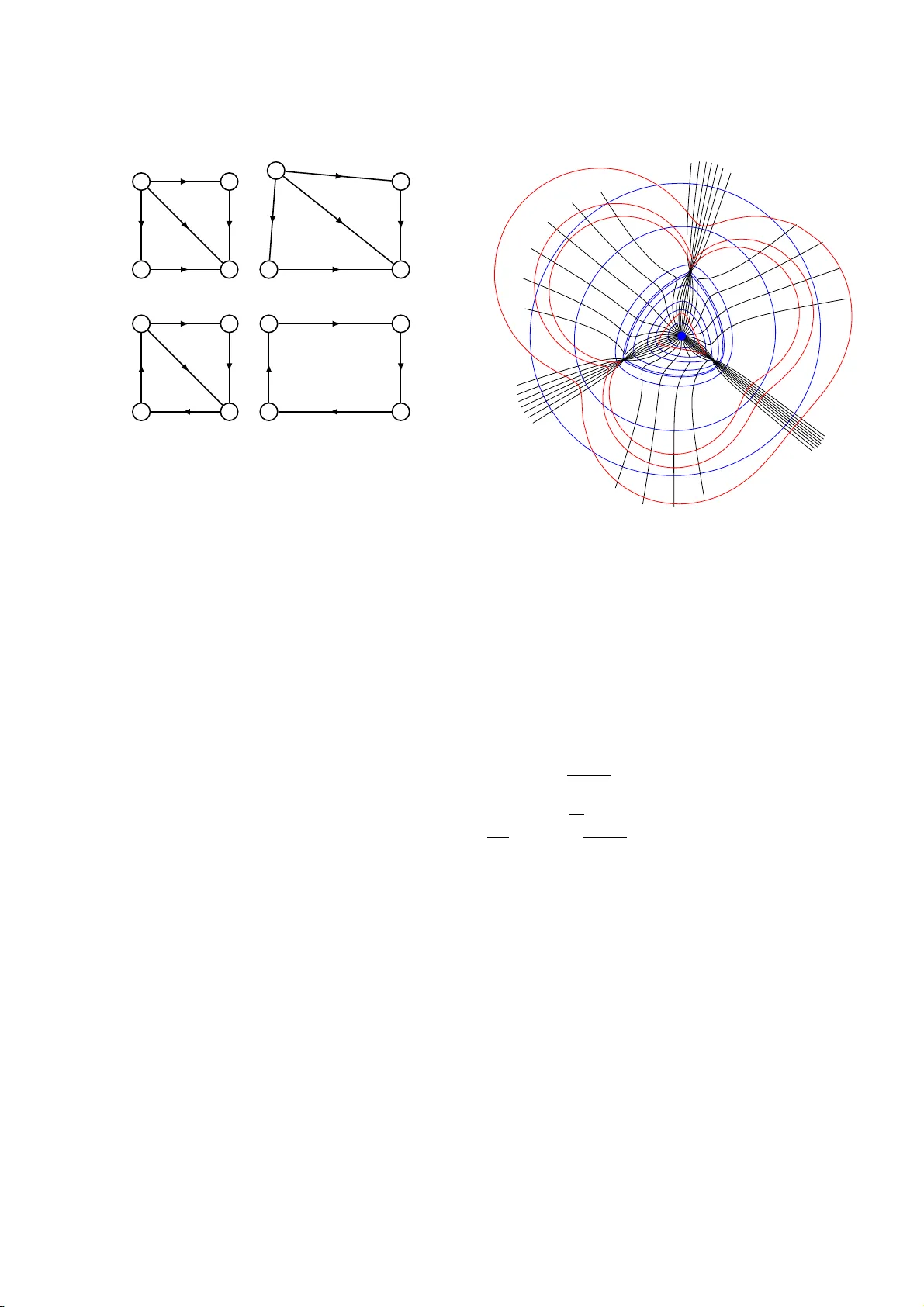
- 그래프 G=(V,E) 는 무향 또는 방향성일 수 있으며, 방향성 그래프에서는 전역적으로 도달 가능한(root) 노드가 존재한다는 가정을 둔다.
2. **무향 그래프에서의 베어링 전용 합의**
- 기존 라플라시안 포텐셜 φ(x)=½∑‖x_j−x_i‖² 를 거리 대신 베어링을 이용해 φ̃(x)=∑_{(i,j)∈E}‖x_j−x_i‖ 로 재정의한다.
- φ̃는 x_i=x_j 일 때 비미분성이 발생하므로, 필리포프 해석을 통해 미분 포함 형태 ˙x∈K
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기